
AlphaGo演算法論文 神經網路加樹搜尋擊敗李世石
 人機大戰
人機大戰公眾號 資料精簡DataSimp
資料精簡DataSimp分享:資訊與資料探勘分析、資料科學研究前沿、資料資源現狀和資料簡化基礎的學科知識、技術應用、產業科研、人物機構、新聞活動等資訊。歡迎大家積極參與投稿,為資料科學產學研做貢獻,使國人儘快提高人類資訊管理能力,提高社會資訊流通效率。本期內容:AlphaGo演算法論文《精通圍棋博弈的深層神經網路和樹搜尋演算法》漢譯(DeepMind圍棋人工智慧團隊2016.1.28發表在《自然》雜誌的nature16961原文翻譯,人工智慧之機器學習經典收藏版)、公號附錄(大資料儲存單位和資料簡化DataSimp公眾號簡介)。
精通圍棋博弈的深層神經網路和樹搜尋演算法
作者:
①戴維·斯爾弗1*,②黃士傑1*,③克里斯·J。·麥迪遜1,④亞瑟·格斯1,⑤勞倫特·西弗瑞1,⑥喬治·範登·德里施1,⑦朱利安·施立特威澤1,⑧揚尼斯·安東諾婁1,⑨吠陀·潘聶施爾萬1,⑩馬克·蘭多特1,⑪傘德·迪勒曼1,⑫多米尼克·格魯1,⑬約翰·納姆2,⑭納爾 卡爾克布倫納1,⑮伊利亞·薩茨基弗2,⑯蒂莫西·李烈克萊普1,⑰馬德琳·裡奇1,⑱科瑞·卡瓦口格魯1,⑲託雷·格雷佩爾1,和⑳戴密斯·哈薩比斯1
作者單位說明:1谷歌DeepMind,英國倫敦EC4A 3TW,新街廣場5號。2谷歌,美國加利福尼亞州94043,景山,劇場路1600號。*這些作者對這項工作作出了同等貢獻。
中文翻譯者說明*:
原文發表在《自然》2016年1月28日第529卷,484-489頁,保留所有權利。©英國麥克米倫出版公司2016版權。本文漢語譯者基於“忠於原文”原則全文翻譯。同時參考自然雜誌官網http://www.nature.com/nature/journal/v529/n7587/full/nature16961.html,由十五部分組成:摘要、導言、策略網路的監督學習、策略網路的強化學習、估值網路的強化學習、基於策略網路和估值網路的搜尋演算法、AlphaGo博弈算力評估、討論、方法、參考文獻、致謝、作者資訊、擴充套件資料影象和表格、補充資料和網站評論。本文翻譯到算力評估。網站提示:郵件可發至戴維·斯爾弗(
歡迎讀者閱讀原文,加強學習理解、掌握應用核心資訊科技。時間倉促,疏漏之處難免,敬請提出寶貴意見。中文譯者:秦隴紀-資料簡化DataSimp(貢獻3/5以上),姬向軍-陝西師範大學,楊武霖-中國空間技術研究院,池紹傑-北京工業大學。(轉載本公號文章請註明作者、出處、時間等資訊,如“此文轉自:資料簡化DataSimp英譯組秦隴紀等人;©微信公號:資料簡化DataSimp;2016.3.15Tue譯著©。”字樣,詳情郵件諮詢[email protected],本文正在投稿,轉載請保留本資訊。歡迎資料科學和人工智慧學界、產業界同仁賜稿。)
摘要:
由於海量搜尋空間、評估棋局和落子行為的難度,圍棋長期以來被視為人工智慧領域最具挑戰的經典遊戲。這裡,我們介紹一種新的電腦圍棋演算法:使用“價值網路”評估棋局、“策略網路”選擇落子。這些深層神經網路,是由人類專家博弈訓練的監督學習和電腦自我博弈訓練的強化學習,共同構成的一種新型組合。沒有任何預先搜尋的情境下,這些神經網路能與頂尖水平的、模擬了千萬次隨機自我博弈的蒙特卡洛樹搜尋程式下圍棋。我們還介紹一種新的搜尋演算法:結合了估值和策略網路的蒙特卡洛模擬演算法。用這種搜尋演算法,我們的程式AlphaGo與其它圍棋程式對弈達到99.8%的勝率,並以5比0擊敗了人類的歐洲圍棋冠軍。這是計算機程式第一次在標準圍棋比賽中擊敗一個人類職業棋手——以前這被認為是需要至少十年以上才能實現的偉業。
導言:
完美資訊類遊戲都有一種最優值函式v*(s),從所有遊戲者完美對弈時每一棋盤局面或狀態s,判斷出遊戲結果。這類遊戲可以通過遞迴計算一個約含bd種可能落子情況序列的搜尋樹,求得上述最優值函式來解決。這裡,b是遊戲廣度(每個局面可合法落子的數量),d是遊戲深度(對弈步數)。在國際象棋(b≈35,d≈80)1,特別是圍棋(b≈250,d≈150)1等大型遊戲中,雖然窮舉搜尋並不可取2,3,但有兩種常規方法可以減少其有效搜尋空間。第一種方法,搜尋深度可以通過局面評估來降低:用狀態s截斷搜尋樹,將s的下級子樹用預測狀態s結果的近似值函式v(s)≈v*(s)代替。這種做法在國際象棋4,跳棋5和奧賽羅6中取得了超過人類的效能;但由於圍棋7的複雜性,這種做法據信在圍棋中變得棘手。第二種方法,搜尋廣度可以用局面s中表示可能落子a的策略函式p(a|s)產生的概率分佈的弈法抽樣來降低。例如,蒙特卡洛走子演算法8搜尋到最大深度時無任何分支,而是用策略變數p為對弈雙方的長弈法序列取樣。大體上,這些走子行為提供了一種有效的局面評估,在五子棋8、拼字遊戲9和低水平業餘圍棋比賽10中均實現了超越人類水平的效能。
蒙特卡洛樹搜尋(MCTS)11,12用蒙特卡洛走子來估算一個搜尋樹中每個狀態的值。隨著更多模擬情況的執行,該搜尋樹生長變大、相關值變得更加準確。隨著時間的推移,通過選擇那些較高估值的子樹,搜尋過程中選擇弈法的策略也得到了提高。該策略漸進收斂於最優弈法,對應的估值結果收斂於該最優值函式12。當下最強的圍棋程式都基於MCTS,通過預測人類高手落子情況而訓練的一些策略,來增強效能13。這些策略大都把此搜尋過程限制在高概率弈法,以及走子時的弈法取樣。該方法已經在很強的業餘博弈中取得了成功13–15。然而,以前的做法僅限於淺層策略13–15,或某些基於一種帶輸入型特徵值的線性函式組合的估值函式。
近來,深度卷積神經網路在視覺領域達到前所未有的高效能:例如影象分類17、人臉識別18、雅達利遊戲19。他們用重疊排列的多層神經元,逐步構建影象的區域性抽象表徵20。我們在圍棋中採用類似架構:通過把棋局看做為一個19×19的影象,使用若干卷積層構造該局面的表徵值。用這些神經網路,我們來減少有效深度及搜尋樹廣度:用一個估值網路評估棋局,用一個策略網路做弈法取樣。
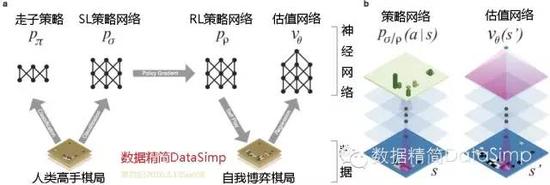
我們用一種由機器學習若干階段組成的管道來訓練這些神經網路(圖1)。開始階段,我們直接使用人類高手的落子弈法訓練一種有監督學習(SL)型走棋策略網路pσ。此階段提供快速、高效的帶有即時反饋和高品質梯度的機器學習更新資料。類似以前的做法13,15,我們也訓練了一個快速走棋策略pπ,能對走子時的弈法快速取樣。接下來的階段,我們訓練一種強化學習(RL)型的走棋策略網路pρ,通過優化那些自我博弈的最終結果,來提高前面的SL策略網路。此階段是將該策略調校到贏取比賽的正確目標上,而非最大程度的預測準確性。最後階段,我們訓練一種估值網路Vθ,來預測那些採用RL走棋策略網路自我博弈的贏家。我們的程式AlphaGo,用MCTS有效結合了策略和估值網路。

圖1:神經網路訓練管道和架構
左邊圖1a,一種快速走子策略pπ和監督學習(SL)策略網路pσ被訓練,用來預測一個局面資料集中人類高手的落子情況。一種強化學習(RL)策略網路pρ按該SL策略網路進行初始化,然後對前一版策略網路用策略梯度學習來最大化該結果(即贏得更多的比賽)。通過和這個RL策略網路自我博弈,產生一個新資料集。最後,一種估值網路vθ由迴歸訓練的,用來預測此自我博弈資料集裡面局面的預期結果(即是否當前玩家獲勝)。右邊圖1b,AlphaGo神經網路架構的示意圖。圖中的策略網路表示:作為輸入變數的棋局s,通過帶引數σ(SL策略網路)或ρ(RL策略網路)的許多卷積層,輸出合法落子情況a的概率分佈或,由此局面概率圖來呈現。此估值網路同樣使用許多帶引數θ的卷積層,但輸出一個用來預測局面sʹ預期結果的標量值vθ(sʹ)。
1、策略網路的監督學習
訓練管道第一階段,我們按以前的做法用監督學習預測圍棋中高手的落子情況13,21–24。此SL策略網路pσ(a|s)在帶有權重陣列變數σ和整流器非線性特徵值陣列的卷積層間交替使用。最終的softmax層輸出一個所有合法落子情況的概率分佈a。此策略網路的輸入變數s是一個棋局狀態的簡單標識變數(見擴充套件資料表2)。策略網路基於隨機取樣的棋盤情形-操作對(s,a)做訓練:採用隨機梯度升序法,在選定狀態s時,取人類落子a的最大相似度,
我們用KGS圍棋伺服器上的3000萬種棋局,訓練了一個13層策略網路,稱之為SL策略網路。對比其他研究團體提交的44.4%頂尖水準,該網路在一個公開測試資料集上預測高手落子情況:採用全部輸入型特徵值可達57.0%精度,只採用原始棋局和落子歷史資料做為輸入可達55.7%(全部結果在擴充套件資料表3)24。準確性上小的改進,可導致算力大幅提高(圖2a);較大網路亦可實現更好的精度,但在搜尋過程中的評價會變慢。我們也訓練了一個快速、但低準確度的走子策略pπ(a|s),採用一種帶權重π的小圖式特徵量的線性softmax層(參見擴充套件資料表4),這樣,僅用2微秒選擇一種弈法可以達到24.2%的精確度,而不是此策略網路的3毫秒。
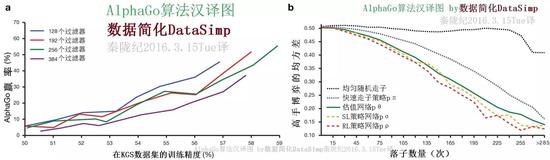
圖2:策略和估值網路的算力和準確性。
圖2a,標尺圖展示作為一個他們訓練精確性函式的策略網路博弈算力。每個卷積層分別有128,192,256和384個過濾器的策略網路在訓練期間被定期評估;此圖顯示AlphaGo運用那種策略網路與比賽版AlphaGo對戰的勝率。圖2b,該估值網路和不同策略走子弈法之間的估值精度比較。從人類專家博弈中做局面和結果取樣。每局都由一個單一向前傳遞的估值網路vθ,或100步走子情況的平均結果做評估,用均勻隨機走子,快速走子策略pπ,SL策略網路pσ或RL策略網路pρ等使局面充分被評估。此預測值和實際博弈間的均方差,繪製在博弈階段(多少落子已經在給定局面)。
2、策略網路的增強學習
訓練管道第二階段,旨在用策略梯度型增強學習(RL)來提高之前的策略網路25,26。這種RL策略網路pρ在結構上與SL策略網路相同,其權重ρ被初始化為相同值:ρ=σ。我們使其在當前策略網路pρ和某個隨機選擇的上次迭代產生的策略網路之間進行對弈。這種方法的訓練,要用隨機化的存有對手穩定態的資料池,來防止對當前策略的過度擬合。我們使用報酬函式r(s),對所有非終端時間步長t<T時,賦值為0。其結果值zt = ± r(sT)是博弈結束時的終端獎勵:按照當前博弈者在時間步長t時的預期,給勝方+1、敗方−1。權重在每一次步長變數t時,按照預期結果最大值的方向,進行隨機梯度升序更新25。
博弈中我們評估該RL策略網路的效能,從弈法輸出概率分佈對每一次落子取樣為。與SL策略網路正面博弈時,RL策略網路贏得了80%以上。我們還用最厲害的開源圍棋程式Pachi14來測試。那是一種複雜的蒙特卡洛搜尋程式——KGS伺服器上排名第二的業餘選手dan,每個落子要執行10萬次模擬。不用任何搜尋,RL策略網路贏得了85%與Pachi的對弈。對照以前的頂尖水平,僅基於卷積網路的監督學習與Pachi23對弈只能贏得11%、與較弱程式Fuego24對弈為12%。
3、估值網路的增強學習
最後階段的訓練管道聚焦在對棋局的評估,用一個估值函式vp(s)做估計,給棋局s中兩個使用策略p的博弈者預測結果28,29,30。

理想情況下,我們想知道完美博弈v*(s)中的該最優值函式;實踐中,我們用值函式代替做估算,作為最強策略用在RL策略網路pρ。我們用帶權重陣列θ的估值網路vθ(s)對此估值函式做近似,

。該神經網路具有一種與此估值函式相似的結構,但輸出一個單一預測,而不是一個概率分佈。我們用狀態-結果對(s, z)迴歸,訓練該估值網路權重,使用隨機梯度降序來最小化該預測值vθ(s)和相應結果z間的均方差(MSE),
用包含全部博弈的資料集,來預測對弈結果的幼稚做法,會導致過度擬合。其錯誤在於:連續棋局是緊密相關的,不同處只有一枚棋子,但其迴歸目標被該完整對弈所共用。我們用這種方法在KGS資料集做過訓練,該估值網路記住了那些博弈結果,並沒有推廣到新棋局,相比此訓練集上的0.19,此測試集上達到了0.37的最小均方差(MSE)。為了緩解這個問題,我們生成了一個新的含有3000萬明顯不同棋局的自我博弈資料集,其每個取樣都來自於某一單獨對弈。每一場對弈都是在上述RL策略網路與自身之間進行,直到博弈結束。在該資料集上的訓練,採用訓練和測試資料集分別可達到0.226和0.234的均方差,這表明最小的過擬合。圖2b顯示了上述估值網路的棋局評估精度,相比使用快速走子策略pπ的蒙特卡洛走子程式,此估值函式一貫都是更加準確。一種vθ(s)單一評價函式也接近使用RL策略網路Pρ的蒙特卡洛程式的精度,且使用少於15000次的計算量。
4。基於策略網路和估值網路的搜尋演算法
AlphaGo在一種採用前向搜尋選擇弈法的MCTS演算法裡,結合使用策略和估值網路(圖3)。每個搜尋樹邊界(s, a)儲存:弈法值Q(s, a),訪問計數N(s, a),和前驅概率P(s, a)。從當前根狀態出發,該搜尋樹用模擬(指已完成的博弈中做無備份降序)做遍歷。在每次模擬的每個時間步長t,從狀態st內選出一個弈法at,

當滿足,最大弈法值加上與前驅概率成正比、但與訪問計數成反比的獎勵值:
,能有效促進對搜尋空間的探索。當這個遍歷在步驟L,搜尋一個葉節點sL時,該葉節點可能被展開。該葉節點的局面sL僅通過SL型策略網路pσ處理一次。該輸出概率被儲存為每次合法弈法a的前驅概率。

這個葉節點通過兩種不同方式被評估:一種是通過估值網路vθ(sL);第二種是,通過一種隨機落子的結果值zL,直到使用快速走子策略pπ在步長T時結束博弈。這些評價被組合起來,用一種混合引數λ,進入一個葉節點估值V(sL):
模擬結束時,遍歷過的所有邊界其弈法值和和訪問計數就會被更新。每個邊界累加其訪問計數值,和所有經過該邊界做的模擬的平均估值:

式中是其第i次模擬的葉節點,1(s, a, i)代表第i次模擬中一個邊界(s, a)是否被訪問。當該搜尋結束時,本演算法選擇這次初始局面模擬的訪問計數最多的弈法來落子。
圖3:AlphaGo的蒙特卡洛樹搜尋。
圖3a,每次模擬都遍歷帶最大弈法值Q的那個邊界節點,與一個由那個邊界節點儲存的前驅概率產生的獎勵值u(P)相加。圖3b,此葉節點可能被展開;新節點採用策略網路pσ,其輸出概率值P被儲存在每個弈法的前驅概率P中。圖3c,模擬結束後,此葉節點被兩種方法評估:採用估值網路vθ;和博弈最後用快速落子策略pπ進執行一次走子,然後用函式r計算此贏家的估值。圖3d,弈法值Q被更新,用來追蹤所有估值r(·)的中間值和那個弈法下面的子樹vθ(·)。
值得注意的是,此AlphaGo的SL策略網路pσ比那個加強型RL策略網路pρ表現地更好,主要原因在於人類選擇最有前景落子中一種可變化的弈法,而RL僅對該單次落子做最優化。然而,從強化後的RL策略網路中推導的估值函式,在AlphaGo的效能要優於SL策略網路推匯出的估值函式。
跟傳統啟發式搜尋相比,策略和估值網路需要高出幾個數量級的計算量。為了有效結合MCTS和深度神經網路,AlphaGo採用非同步多執行緒搜尋,在多CPU上執行模擬、多GPU平行計算策略和估值網路。本最終版AlphaGo使用了40個搜尋執行緒、48個CPU和8個GPU。我們也應用了一種分散式AlphaGo版本,部署在多臺機器上、40個搜尋執行緒、1202個CPU和176個GPU。方法章節提供非同步和分散式MCTS全部細節。
5.AlphaGo博弈算力評估
為了評估AlphaGo,我們在幾個版本的AlphaGo和其它幾種圍棋程式之間運行了一場內部競賽,包括最強商業軟體Crazy Stone13,和Zen,和最強開源程式Pachi14和Fuego15。所有這些程式基於高效能MCTS演算法。此外,我們納入了開源程式GnuGo,一種使用優於MCTS的頂級水平搜尋演算法的圍棋程式。在比賽中,所有軟體每一步都只有5s中的計算時間。
(未完待續。感謝翻譯過程中Dr何萬青Dr餘凱ETS顏為民等人的譯文建議。歡迎大家關注譯文質量,我們共同提高。)
附錄一、大資料儲存單位(TB以上)
計算機儲存最小的基本單位是bit,按順序給出所有計量單位:bit位(無法分割)、Byte位元組(10^0)、KB千位元組(10^1)、MB兆位元組(10^3)、GB吉位元組(10^6)、TB太位元組(10^9)、PB拍位元組(10^12)、EB艾位元組(10^15)、ZB澤位元組(10^18)、YB堯位元組(10^21)、BB(10^24)、NB(10^27)、DB(10^30)。大資料儲存單位大都TB以上,按照進率1024(2的十次方)來計算:
1 TB = 1,024 GB(Gigabyte吉位元組) = 1,048,576 MB(Megabytes兆位元組);
1 PB(Petabyte千萬億位元組,拍位元組) = 1,024 TB(Terabytes) = 1,048,576 GB;
1 EB(Exabyte百億億位元組,艾位元組) = 1,024 PB(Petabytes) = 1,048,576 TB;
1 ZB(Zettabyte十萬億億位元組,澤位元組) = 1,024 EB(Exabytes) = 1,048,576 PB;
1 YB(Yottabyte一億億億位元組,堯位元組) = 1,024 ZB(Zettabytes) = 1,048,576 EB;
1 BB(Brontobyte一千億億億位元組) = 1,024 YB(Yottabytes) = 1,048,576 ZB;
1 NB(N?Geopbyte?沒查到翻譯) = 1,024 BB(Brontobytes) = 1,048,576 YB;
1 DB(?沒查到) = 1,024 NB = 1,048,576 BB。
注:進位制單位全稱及譯音 yotta [堯]它 Y。 10^21, zetta [澤]它 Z。 10^18, exa [艾]可薩 E。 10^15, peta [拍]它 P。 10^12, tera [太]拉 T。 10^9, giga [吉]咖 G。 10^6, mega [兆] M。 10^3“兆”為百萬級數量單位。(秦隴紀16科普版)
相關推薦
AlphaGo演算法論文 神經網路加樹搜尋擊敗李世石
人機大戰 公眾號 資料精簡DataSimp 資料精簡DataSimp分享:資訊與資料探勘分析、資料科學研究前沿、資料資源現狀和資料簡化基礎的學科知識、技術應用、產業科研、人物機構、新聞活動等資訊。歡迎大家積極參與投稿,為資料科學產學研做貢獻,使國人儘快提高人類資訊管理能力,提高社會資訊流通效率。
AlphaGo論文的譯文,用深度神經網路和樹搜尋征服圍棋:Mastering the game of Go with deep neural networks and tree search
前言: 圍棋的英文是 the game of Go,標題翻譯為:《用深度神經網路和樹搜尋征服圍棋》。譯者簡介:大三,211,電腦科學與技術專業,平均分92分,專業第一。為了更好地翻譯此文,譯者查看了很多資料。譯者翻譯此論文已盡全力,不足之處希望讀者指出
NASH:基於豐富網路態射和爬山演算法的神經網路架構搜尋 | ICLR 2018
> 論文提出NASH方法來進行神經網路結構搜尋,核心思想與之前的EAS方法類似,使用網路態射來生成一系列效果一致且繼承權重的複雜子網,本文的網路態射更豐富,而且僅需要簡單的爬山演算法輔助就可以完成搜尋,耗時0.5GPU day 來源:曉飛的演算法工程筆記 公眾號 **論文: Simple An
遺傳演算法+BP神經網路組合求解非線性函式
用遺傳演算法求解非線性問題是常見的求解演算法之一,求解的過程就是隨機生成解,計算適應度,然後選擇,交叉,變異,更新種群,不斷迭代,這樣,每個個體都會向每代中最佳的個體學習並靠攏,這是區域性最優解;而變異操作是為了在靠近當前最優解的同時還有機會變異出更佳的基因,從而跳出區域性最優解而達到全域性最優解。
漫談機器學習經典演算法—人工神經網路
注:整理自向世明老師的PPT 內容提要 1 發展歷史 2 前饋網路(單層感知器,多層感知器,徑向基函式網路RBF) 3 反饋網路(Hopfield網路,聯想儲存網路,SOM,Boltzman及受限的玻爾茲曼機RBM,DBN,CNN) 發展歷史
AlphaGo的制勝祕訣:蒙特卡洛樹搜尋初學者指南
長久以來,計算機在圍棋領域不可能達到人類專家的水平一直是學術界的主流觀點。圍棋,被認為是人工智慧的“聖盃”——一個我們原本希望在未來十年努力攻克的里程碑。 二十年前,“深藍”就已經在國際象棋上超越了人類,二十年過去了,計算機卻依然無法在圍棋這一專案上戰勝人類。圍
深度學習演算法原理——神經網路的基本原理
一、神經網路 1、神經元概述 神經網路是由一個個的被稱為“神經元”的基本單元構成,單個神經元的結構如下圖所示: 對於上述的神經元,其輸入為x1x1,x2x2,x3x3以及截距+1+1,其輸出為: hW,b(x)=f(WTx)=f(∑i
【演算法】神經網路和深度學習簡介
01 深度學習掀起海嘯如今,深度學習浪潮拍打計算機語言的海岸已有好幾年,但是,2015年似乎才是
蒙特卡羅樹搜尋+深度學習 -- AlphaGo原版論文閱讀筆記
原版論文是《Mastering the game of Go with deep neural networks and tree search》,有時間的還是建議讀一讀,沒時間的可以看看我這篇筆記湊活一下。網上有一些分析AlphaGo的文章,但最經典的肯定還是
AlphaGo背後的搜尋演算法:蒙特卡羅樹搜尋 && alphago 程式碼
本文首發於微信公眾號號“程式設計派”。微信搜尋“程式設計派”,獲取更多Python程式設計一手教程及優質資源吧。 昨天(3月9日)下午,經過三個多小時的較量,韓國棋手李世石宣佈向谷歌人工智慧AplphaGo認輸,意味著人工智慧獲得了這場人機世紀之戰的第一場勝利。而此前AlphaGo已經以平等條件擊敗了歐
決策樹、貝葉斯、人工神經網路、K-近鄰、支援向量機等常用分類演算法小結
單一的分類演算法:決策樹、貝葉斯、人工神經網路、K-近鄰、支援向量機和基於關聯規則的分類,HMM 組合分類演算法:Bagging和Boosting k-近鄰(kNN,k-Nearest Neighbors)演算法 找出與未知樣本x距離最近的k個訓練樣本,看這k個樣本中
【神經網路】自編碼聚類演算法--DEC (Deep Embedded Clustering)
1.演算法描述 最近在做AutoEncoder的一些探索,看到2016年的一篇論文,雖然不是最新的,但是思路和方法值得學習。論文原文連結 http://proceedings.mlr.press/v48/xieb16.pdf,論文有感於t-SNE演算法的t-
改善深層神經網路_優化演算法_mini-batch梯度下降、指數加權平均、動量梯度下降、RMSprop、Adam優化、學習率衰減
1.mini-batch梯度下降 在前面學習向量化時,知道了可以將訓練樣本橫向堆疊,形成一個輸入矩陣和對應的輸出矩陣: 當資料量不是太大時,這樣做當然會充分利用向量化的優點,一次訓練中就可以將所有訓練樣本涵蓋,速度也會較快。但當資料量急劇增大,達到百萬甚至更大的數量級時,組成的矩陣將極其龐大,直接對這麼大
CIKM 18 | 螞蟻金服論文:基於異構圖神經網路的惡意賬戶識別方法
小螞蟻說: ACM CIKM 2018 全稱是 The 27th ACM International Conference on Information and Knowledge Management,會議於2018年10月22日-26日在義大利都靈省舉行。 CIMK 是國際計算機學會(ACM
吳恩達機器學習(第十章)---神經網路的反向傳播演算法
一、簡介 我們在執行梯度下降的時候,需要求得J(θ)的導數,反向傳播演算法就是求該導數的方法。正向傳播,是從輸入層從左向右傳播至輸出層;反向傳播就是從輸出層,算出誤差從右向左逐層計算誤差,注意:第一層不計算,因為第一層是輸入層,沒有誤差。 二、如何計算 設為第l層,第j個的誤差。
深度學習神經網路論文們可能會誤導人的地方
可好可差的特點,強調它作為優點時候的特性。比如手機重,就說有質感;輕了,就說輕盈不累手。再比如引數量少了,強調這樣可以避免過擬合,並且不用調整太多的引數,訓練會變快;引數量大了,就強調這個模型引數足夠多,也就有強大的能力來提取資料集中的特徵,萬能逼近,超引數多了說人可以掌控模型。讓人誤以為
吳恩達機器學習 - 神經網路的反向傳播演算法 吳恩達機器學習 - 神經網路的反向傳播演算法
原 吳恩達機器學習 - 神經網路的反向傳播演算法 2018年06月21日 20:59:35 離殤灬孤狼 閱讀數:373
誰擋了我的神經網路?(二)—— 優化演算法
誰擋了我的神經網路?(二)—— 優化演算法 這一系列文章介紹了在神經網路的設計和訓練過程中,可能提升網路效果的一些小技巧。前文介紹了在訓練過程中的一系列經驗,這篇文章將重點關注其中的優化演算法部分。更新於2018.11.1。 文章目錄 誰擋了我的神經網路?(
5.神經網路演算法
1.背景 1.1以人腦的神經網路為啟發,歷史上出現過很多不同的版本 1.2最著名的演算法是1980年的是backpropagation 2.多層向前神經網路(Multilayer Feed-Forward Neural Network) 2.1 Backpropagation被使用在
神經網路和BP演算法推導
我的原文:www.hijerry.cn/p/53364.htm… 感知機 感知機(perceptron)於1957年由Rosenblatt提出,是一種二分類線性模型。感知機以樣本特徵向量作為輸入,輸出為預測類別,取正、負兩類。感知機最終學習到的是將輸入空間(特徵空間)劃分為正、負兩類的分離超平面,屬於判別