
快速排序的時間複雜度nlogn是如何推導的??
本文以快速排序為例,推導了快排的時間複雜度nlogn是如何得來的,其它演算法與其類似。
對資料Data = { x1, x2... xn }:
T(n)是QuickSort(n)消耗的時間;
P(n)是Partition(n)消耗的時間;
(注:Partition專指把n個數據分為大小2份的時間)
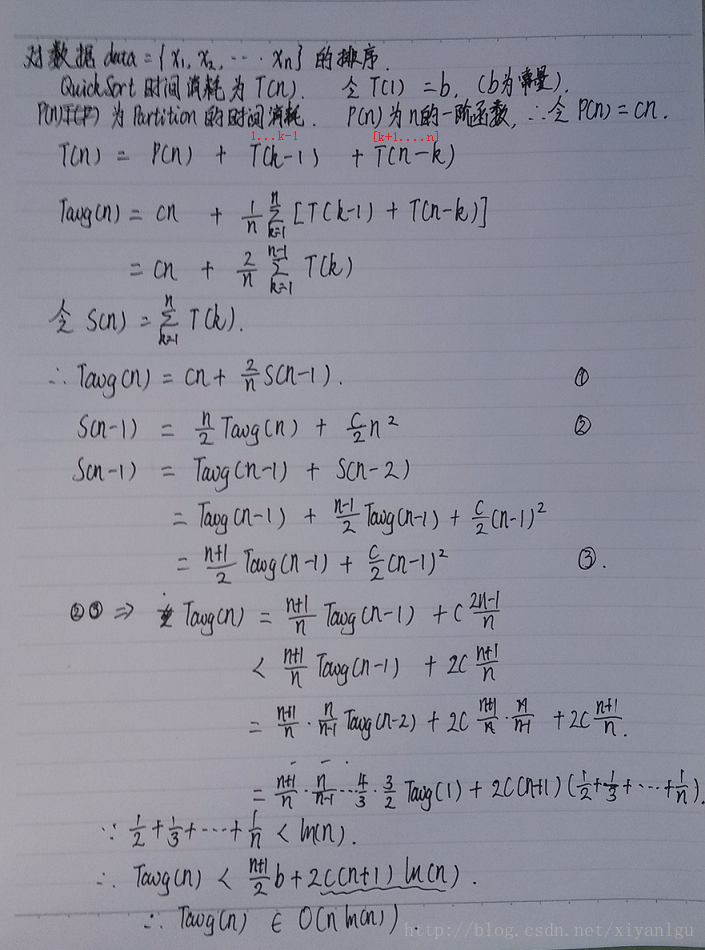
有些文章給出了快排的精確計算結果:

注:ln( n ) > 1/2 + 1/3 ... + 1/n
證明:

相關推薦
java 快速排序 時間複雜度 空間複雜度 穩定性
1、快速排序的基本思想: 通過一趟排序將待排序記錄分割成獨立的兩部分,其中一部分記錄的關鍵字均比另一部分關鍵字小,則分別對這兩部分繼續進行排序,直到整個序列有序。 先看一下這幅圖: 把整個序列看做一個數組,把第零個位置看做中軸,
快速排序的時間複雜度nlogn是如何推導的??
本文以快速排序為例,推導了快排的時間複雜度nlogn是如何得來的,其它演算法與其類似。 對資料Data = { x1, x2... xn }: T(n)是QuickSort(n)消耗的時間; P(n)是Partition(n)消耗的時間; (注:Partition專指把n個
計數排序--時間複雜度為線性的排序演算法
我們知道基於比較的排序演算法的最好的情況的時間複雜度是O(nlgn),然而存在一種神奇的排序演算法,不是基於比較的,而是空間換時間,使得時間複雜度能夠達到線性O(n+k),這種演算法就是本文將
歸併排序時間複雜度----主定理
http://blog.csdn.net/touch_2011/article/details/6785881 1、序言 2、歸併排序 2.1 引出 歸併排序又是另一類排序演算法,它是一種基於“分治”策略的一種演算法。歸
比較演算法排序時間複雜度證明過程
比較演算法排序 證明過程 通過排序樹,我們將陣列的比較過程分解(兩數相比得到的結果將為二叉樹) 則所有的葉節點的排列順序為可能的排列順序(若有nnn個元素,則排列個數為n!n!n!) 則決策樹的規模為指數級。(論文中出現的虛擬碼雖然及其難懂但長度較為固定)
排序總結,插入排序 選擇排序 交換排序 歸併排序 計數排序 時間複雜度空間複雜度穩定性詳解
排序大體分為兩類:比較排序和非比較排序一 各個排序的基本實現1.直接插入排序和希爾排序//整體思路:往一段有序區間插入元素,end標記為有序區間的最後一個元素下標,要插入的元素下標為end+1此處就稱tmp,先把他儲存起來,(否則可能被覆蓋)如果end+1這個元素 //
各排序時間複雜度
排序方法 最好情況 最壞情況 平均情況 穩定性 氣泡排序 O(n) O(n2)
C++的STL庫,vector sort排序時間複雜度 及常見容器比較
http://www.cnblogs.com/sthv/p/5511921.html http://www.169it.com/article/3215620760.html http://www.cnblogs.com/sharpfeng/archi
氣泡排序(時間複雜度分析)
氣泡排序: public static void bubbleSort(int[] arr) { if(arr == null || arr.length < 2) { return; }
Java-時間複雜度為O(nlogn)的排序演算法(快速排序, 歸併排序, 堆排序, 希爾排序)
/** 包含多種靜態排序方法 * Created by Andre on 2016/6/27. */ public class Sorter { /** * 快速排序 * 遞迴形式 * 第一個記錄為樞軸 * 不穩定
快速排序演算法詳解(原理、實現和時間複雜度)
快速排序是對氣泡排序的一種改進,由 C.A.R.Hoare(Charles Antony Richard Hoare,東尼·霍爾)在 1962 年提出。 快速排序的基本思想是:通過一趟排序將要排序的資料分割成獨立的兩部分,其中一部分的所有資料比另一部分的所有資料要小,再按這種方法對這兩部分資料分別進行快速排
【PHP-排序演算法】快速排序、堆排序演算法時間複雜度比較
介紹 在以往工作或者面試的時候常會碰到一個問題,如何實現海量TopN,就是在一個非常大的結果集裡面快速找到最大的前10或前100個數,同時要保證記憶體和速度的效率,我們可能第一個想法就是利用排序,然後擷取前10或前100,而排序對於量不是特別大的時候沒有任何問題,但只要
關於基於比較的排序演算法,時間複雜度“最壞”下界o(nlogn)與“最優”下界o(n)說明
前言 之前在查詢基於比較排序演算法的時間複雜度時發現,好多博主對“最壞”下界與“最優”下界沒有分清,而是預設的把時間複雜度o(nlogn)當成了“最優”下界。這樣很是誤導大家,影響很不好。所以特此寫一篇說明文章,能讓大家理解得更透徹。 下界
快速排序演算法及時間複雜度分析(原地in-place分割槽版本)
快速排序演算法一般來說是採用遞迴來實現,其最關鍵的函式是partition分割函式,其功能是將陣列劃分為兩部分,一部分小於選定的pivot,另一部分大於選定的pivot。我們將重點放在該函式上面。 partition函式總體思路是自從一邊查詢,找到小於pivot的元素,則將
快速排序及時間複雜度分析
它的基本思想是:通過一趟排序將要排序的資料分割成獨立的兩部分,其中一部分的所有資料都比另外一部分的所有資料都要小,然後再按此方法對這兩部分資料分別進行快速排序,整個排序過程可以遞迴進行,以此達到整個資料
「改進的快速排序」時間複雜度接近O(n)
1.快速排序知識點回顧: 快速排序採用了一種分治的策略,通常稱其為分治法(Divide-and-Conquer)。 平均時間複雜度為:O(nlogn) 最好時間複雜度為:O(nlogn), 每次找的基準數最佳,為每個區間的中值。 最壞時間複
快速排序 及其時間複雜度和空間複雜度
快速排序是排序演算法中效率相對較高的,但使用的人卻是比較少,大家一般信手拈來的排序演算法就是氣泡排序。因為氣泡排序主觀,容易理解,而快速排序使用到了遞迴,大家可能就有點不知所措了。 演算法分析 快速排序由C. A. R. Hoare在1962年提出。
基於比較的排序,時間複雜度下界是o(nlogn)的小證明
原因: 對於n個待排序元素,在未比較時,可能的正確結果有n!種。 在經過一次比較後,其中兩個元素的順序被確定,所以可能的正確結果剩餘n!/2種。 依次類推,直到經過m次比較,剩餘可能性n!/(2^m)種。 直到n!/(2^m)<=1時,結果只剩餘一種。此時的比較次數m為o(nlogn)次。 所以基於排
快速排序:原始碼(C++)--虛擬碼--時間複雜度解析
namespace htx{ //////////////////1.快速排序//////////////////////// //<1>原始碼 <2>虛擬碼 <
快速排序的時間複雜度和空間複雜度
最近沒有寫快速排序演算法,就轉了一下這個程式碼 快速排序演算法在陣列中選擇一個稱為主元(pivot)的元素,將陣列分為兩部分,使得 第一部分中的所有元素都小於或等於主元,而第二部分的所有元素都大於主元。對第一部分遞迴地應用快速排序演算法,然後對第二部分遞迴地應