
你瞭解工業6軸機器人的軸指及運動方式嗎?
隨著社會進步、科技發展,工業機器人的應用也越來越普遍。工業機器人是能夠實現自動控制的、可重複程式設計的、多自由度的、運動自由度建成空間直角關係的、多用途的操作機。其工作的行為方式主要是通過完成沿著X、Y、Z軸上的線性運動。由於其種類眾多、運動軸與座標系也很多,確定起來容易出錯,對於新手尤其如此。

機器人運動軸
所謂工業機器人的軸可以用專業的名詞自由度來解釋,如果機器人具有三個自由度,那麼它可以沿x,y,z軸自由的運動,但是它卻不能傾斜或者轉動。當機器人的軸數增加,對機器人而言,就是更高的靈活性。
工業機器人在生產中,一般需要配備除了自身效能特點的外圍裝置,如轉動工件的迴轉臺,移動工件的移動臺等。這些外圍裝置的運動和位置控制都需要與工業機器人相配合並要求相應精度。通常機器人運動軸按其功能可劃分為機器人軸、基座軸和工裝軸,基座軸和工裝軸統稱外部軸。
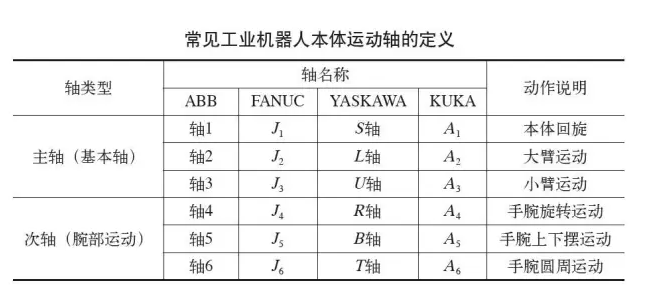

在實際生產中常用的是6關節工業機器人,該操作機有6個可活動的關節(軸),不同的工業機器人本體運動軸的定義也不同。用於保證末端執行器達到工作空間任意位置的軸稱為基本軸或主軸;用於實現末端執行器任意空間姿態的軸,稱為腕部軸或次軸。
6軸關節機器人
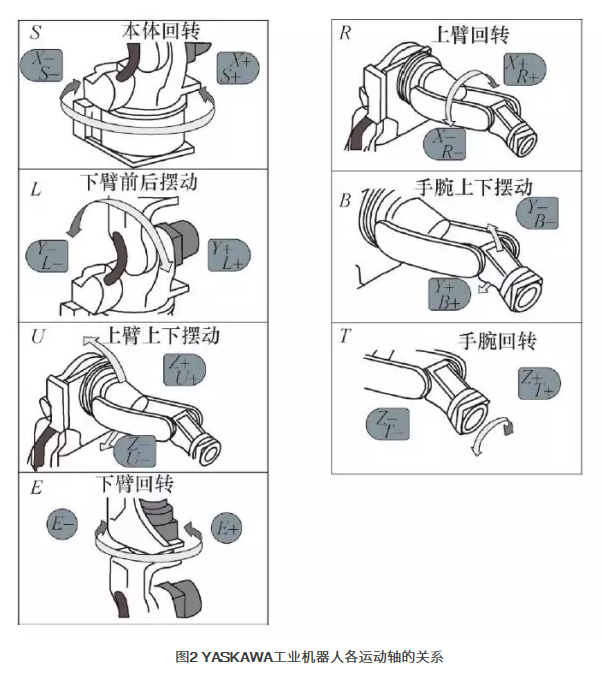
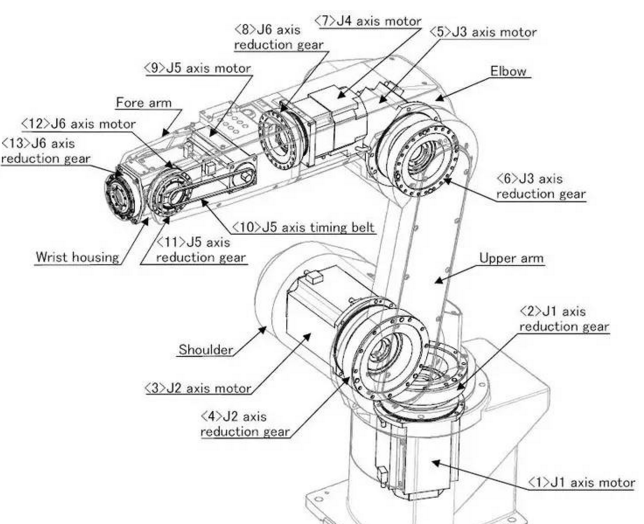
六軸關節機器人的機械結構,六個伺服電機直接通過減速器、同步帶輪等驅動六個關節軸的旋轉。六軸工業機器人一般有6個自由度,常見的六軸工業機器人包含旋轉(S軸),下臂(L軸)、上臂(U軸)、手腕旋轉(R軸)、手腕擺動(B軸)和手腕迴轉(T軸)。6個關節合成實現末端的6自由度動作。
六軸關節機器人的運動方式:
六軸工業機器人作為工業機器人中應用中最為廣泛的型別,具有高靈活性、超大負載、高定位精度等眾多優點。那六個軸的各自運動路徑如何,數自君將以FANUC robot R-2000 iB來進行詳細解讀。
J1旋轉(S軸)

J2下臂(L軸)
J3上臂(U軸)
J4手腕旋轉(R軸)
J5手腕擺動(B軸)
J6手腕迴轉(T軸)
--- THE END ---
免責宣告:本文系網路轉載或改編,版權歸原作者所有。如涉及版權,請聯絡刪除!