
圖解kubernetes排程器預選設計實現學習
Scheduler中在進行node選舉的時候會首先進行一輪預選流程,即從當前叢集中選擇一批node節點,本文主要分析k8s在預選流程上一些優秀的篩選設計思想,歡迎大佬們指正
1. 基礎設計
1.1 預選場景
預選顧名思義就是從當前叢集中的所有的node中,選擇出滿足當前pod資源和親和性等需求的node節點,如何在叢集中快速選擇這樣的節點,是個複雜的問題
1.2 平均分佈
平均分佈主要是通過讓一個分配索引來進行即只有當所有的node都在本輪分配週期內分配一次後,才開始從頭進行分配,從而保證叢集的平均分佈
1.3 預選中斷
預選終端即在預選的過程中如果發現node已經不能滿足當前pod資源需求的時候,就進行中斷預選流程,嘗試下一個節點
1.4 並行篩選
在當前k8s版本中,預設會啟動16個goroutine來進行並行的預選,從而提高效能,從而提高預選的效能
1.5 區域性最優解
預選流程需要從當前叢集中選擇一臺符合要求的node隨著叢集規模的增長,如果每次遍歷所有叢集node則會必然導致效能的下降,於是通過區域性最優解的方式,縮小篩選節點的數量
2. 原始碼分析
預選的核心流程是通過findNodesThatFit來完成,其返回預選結果供優選流程使用
2.1 取樣邏輯
取樣是通過當前叢集中的node數量和預設的最小值來決定本次預選階段需要獲取的node節點數量
// 獲取所有的節點數量,並通過計算百分比,獲取本次選舉選擇的節點數量 allNodes := int32(g.cache.NodeTree().NumNodes()) // 確定要查詢node數量 numNodesToFind := g.numFeasibleNodesToFind(allNodes)
2.2 取樣演算法
取樣演算法很簡單從叢集中獲取指定百分比的節點預設是50%,如果50%的節點數量小於minFeasibleNodesToFind則按照minFeasibleNodesToFind(最小取樣節點數量)來取樣,
func (g *genericScheduler) numFeasibleNodesToFind(numAllNodes int32) (numNodes int32) { // 如果當前節點數量小於minFeasibleNodesToFind即小於100臺node // 同理百分比如果大於100就是全量取樣 // 這兩種情況都直接遍歷整個叢集中所有節點 if numAllNodes < minFeasibleNodesToFind || g.percentageOfNodesToScore >= 100 { return numAllNodes } adaptivePercentage := g.percentageOfNodesToScore if adaptivePercentage <= 0 { adaptivePercentage = schedulerapi.DefaultPercentageOfNodesToScore - numAllNodes/125 if adaptivePercentage < minFeasibleNodesPercentageToFind { adaptivePercentage = minFeasibleNodesPercentageToFind } } // 正常取樣計算:比如numAllNodes為5000,而adaptivePercentage為50% // 則numNodes=50000*0.5/100=250 numNodes = numAllNodes * adaptivePercentage / 100 if numNodes < minFeasibleNodesToFind { // 如果小於最少取樣則按照最少取樣進行取樣 return minFeasibleNodesToFind } return numNodes }
2.3 取樣元資料準備
通過filtered來進行預選結果的儲存,通過filteredLen來進行原子保護協作多個取樣goroutine, 並通過predicateMetaProducer和當前的snapshot來進行元資料構建
filtered = make([]*v1.Node, numNodesToFind)
errs := errors.MessageCountMap{}
var (
predicateResultLock sync.Mutex
filteredLen int32
)
ctx, cancel := context.WithCancel(context.Background())
// We can use the same metadata producer for all nodes.
meta := g.predicateMetaProducer(pod, g.nodeInfoSnapshot.NodeInfoMap)2.4 通過channel協作並行取樣
並行取樣主要通過呼叫下面的函式來啟動16個goroutine來進行並行取樣,並通過ctx來協調退出
workqueue.ParallelizeUntil(ctx, 16, int(allNodes), checkNode)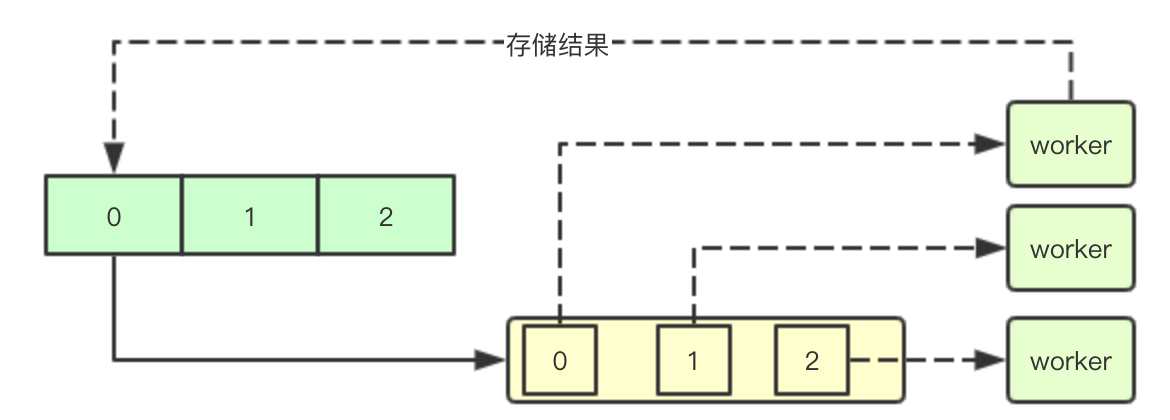
通過channel來構建取樣索引的管道,每個worker會負責從channel獲取的指定索引取樣node的填充
func ParallelizeUntil(ctx context.Context, workers, pieces int, doWorkPiece DoWorkPieceFunc) {
var stop <-chan struct{}
if ctx != nil {
stop = ctx.Done()
}
// 生成指定數量索引,worker通過索引來進行預選成功節點的儲存
toProcess := make(chan int, pieces)
for i := 0; i < pieces; i++ {
toProcess <- i
}
close(toProcess)
if pieces < workers {
workers = pieces
}
wg := sync.WaitGroup{}
wg.Add(workers)
for i := 0; i < workers; i++ {
// 啟動多個goroutine
go func() {
defer utilruntime.HandleCrash()
defer wg.Done()
for piece := range toProcess {
select {
case <-stop:
return
default:
//獲取索引,後續會通過該索引來進行結果的儲存
doWorkPiece(piece)
}
}
}()
}
// 等待退出
wg.Wait()
}2.5 取樣並行函式
checkNode := func(i int) {
// 獲取一個節點
nodeName := g.cache.NodeTree().Next()
// 取樣核心流程是通過podFitsOnNode來確定
fits, failedPredicates, status, err := g.podFitsOnNode(
pluginContext,
pod,
meta,
g.nodeInfoSnapshot.NodeInfoMap[nodeName],
g.predicates, // 傳遞預選演算法
g.schedulingQueue,
g.alwaysCheckAllPredicates,
)
if err != nil {
predicateResultLock.Lock()
errs[err.Error()]++
predicateResultLock.Unlock()
return
}
if fits {
// 如果當前以及查詢到的數量大於預選的數量,就退出
length := atomic.AddInt32(&filteredLen, 1)
if length > numNodesToFind {
cancel()
atomic.AddInt32(&filteredLen, -1)
} else {
filtered[length-1] = g.nodeInfoSnapshot.NodeInfoMap[nodeName].Node()
}
} else {
// 進行錯誤狀態的儲存
predicateResultLock.Lock()
if !status.IsSuccess() {
filteredNodesStatuses[nodeName] = status
}
if len(failedPredicates) != 0 {
failedPredicateMap[nodeName] = failedPredicates
}
predicateResultLock.Unlock()
}
}2.6 面向未來的篩選
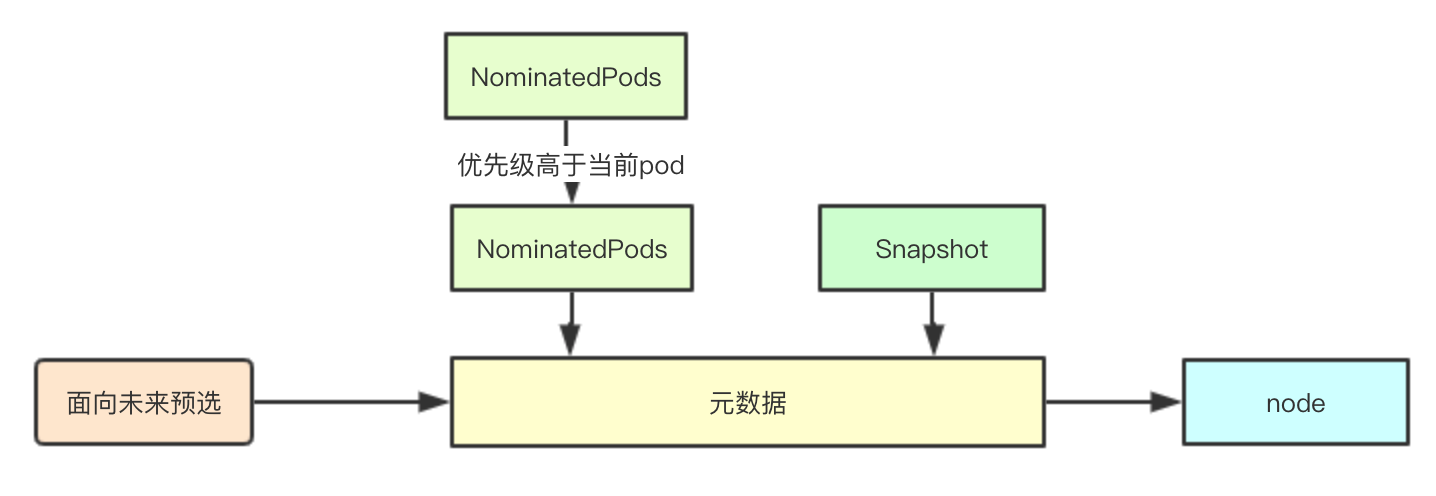
在kubernetes中經過排程器排程後的pod結果會放入到SchedulingQueue中進行暫存,這些pod未來可能會經過後續排程流程執行在提議的node上,也可能因為某些原因導致最終沒有執行,而預選流程為了減少後續因為排程衝突(比如pod之間的親和性等問題,並且當前pod不能搶佔這些pod),則會在進行預選的時候,將這部分pod考慮進去
如果在這些pod存在的情況下,node可以滿足當前pod的篩選條件,則可以去除被提議的pod再進行篩選(如果這些提議的pod最終沒有排程到node,則當前node也需要滿足各種親和性的需求)
2.6 取樣核心設計

結合上面說的面向未來的篩選,通過兩輪篩選在無論那些優先順序高的pod是否被排程到當前node上,都可以滿足pod的排程需求,在排程的流程中只需要獲取之前註冊的排程演算法,完成預選檢測,如果發現有條件不通過則不會進行第二輪篩選,繼續選擇下一個節點
func (g *genericScheduler) podFitsOnNode(
pluginContext *framework.PluginContext,
pod *v1.Pod,
meta predicates.PredicateMetadata,
info *schedulernodeinfo.NodeInfo,
predicateFuncs map[string]predicates.FitPredicate,
queue internalqueue.SchedulingQueue,
alwaysCheckAllPredicates bool,
) (bool, []predicates.PredicateFailureReason, *framework.Status, error) {
var failedPredicates []predicates.PredicateFailureReason
var status *framework.Status
// podsAdded主要用於標識當前是否有提議的pod如果沒有提議的pod則就不需要再進行一輪篩選了
podsAdded := false
for i := 0; i < 2; i++ {
metaToUse := meta
nodeInfoToUse := info
if i == 0 {
// 首先獲取那些提議的pod進行第一輪篩選, 如果第一輪篩選出錯,則不會進行第二輪篩選
podsAdded, metaToUse, nodeInfoToUse = addNominatedPods(pod, meta, info, queue)
} else if !podsAdded || len(failedPredicates) != 0 {
// 如果
break
}
for _, predicateKey := range predicates.Ordering() {
var (
fit bool
reasons []predicates.PredicateFailureReason
err error
)
//TODO (yastij) : compute average predicate restrictiveness to export it as Prometheus metric
if predicate, exist := predicateFuncs[predicateKey]; exist {
// 預選演算法計算
fit, reasons, err = predicate(pod, metaToUse, nodeInfoToUse)
if err != nil {
return false, []predicates.PredicateFailureReason{}, nil, err
}
if !fit {
// eCache is available and valid, and predicates result is unfit, record the fail reasons
failedPredicates = append(failedPredicates, reasons...)
// if alwaysCheckAllPredicates is false, short circuit all predicates when one predicate fails.
if !alwaysCheckAllPredicates {
klog.V(5).Infoln("since alwaysCheckAllPredicates has not been set, the predicate " +
"evaluation is short circuited and there are chances " +
"of other predicates failing as well.")
break
}
}
}
}
status = g.framework.RunFilterPlugins(pluginContext, pod, info.Node().Name)
if !status.IsSuccess() && !status.IsUnschedulable() {
return false, failedPredicates, status, status.AsError()
}
}
return len(failedPredicates) == 0 && status.IsSuccess(), failedPredicates, status, nil
}微訊號:baxiaoshi2020

關注公告號閱讀更多原始碼分析文章
更多文章關注 www.sreguide.com
本文由部落格一文多發平臺 OpenWrite 釋出