
【小白學PyTorch】8 實戰之MNIST小試牛刀
阿新 • • 發佈:2020-09-09
文章來自微信公眾號【機器學習煉丹術】。有什麼問題都可以諮詢作者WX:cyx645016617。想交個朋友佔一個好友位也是可以的~好友位快滿了不過。
參考目錄:
[TOC]
在這個文章中,主要是來做一下MNIST手寫數字集的分類任務。這是一個基礎的、經典的分類任務。建議大家一定要跟著程式碼做一做,原始碼已經上傳到公眾號。
## 1 探索性資料分析
一般在進行模型訓練之前,都要做一個數據集分析的任務。這個在英文中一般縮寫為**EDA**,也就是Exploring Data Analysis(好像是這個)。
**資料集獲取方面**,這裡本來是要使用之前課程提到的```torchvision.datasets.MNIST()```,但是考慮到這個torchvision提供的MNIST完整下載下來需要200M的大小,所以我就直接提供了MNIST的資料的CSV檔案(包含```train.csv```和```test.csv```),大小壓縮成```.zip```之後只有14M,程式碼就基於了這個資料檔案。
### 1.1 資料集基本資訊
```python
import pandas as pd
# 讀取訓練集
train_df = pd.read_csv('./MNIST_csv/train.csv')
n_train = len(train_df)
n_pixels = len(train_df.columns) - 1
n_class = len(set(train_df['label']))
print('Number of training samples: {0}'.format(n_train))
print('Number of training pixels: {0}'.format(n_pixels))
print('Number of classes: {0}'.format(n_class))
# 讀取測試集
test_df = pd.read_csv('./MNIST_csv/test.csv')
n_test = len(test_df)
n_pixels = len(test_df.columns)
print('Number of test samples: {0}'.format(n_test))
print('Number of test pixels: {0}'.format(n_pixels))
```
輸出結果:
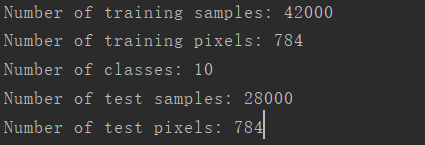
訓練集有42000個圖片,每個圖片有784個畫素(所以變成圖片的話需要將784的畫素變成$28\times 28$),樣本總共有10個類別,也就是0到9。測試集中有28000個樣本。
### 1.2 資料集視覺化
```python
# 展示一些圖片
import numpy as np
from torchvision.utils import make_grid
import torch
import matplotlib.pyplot as plt
random_sel = np.random.randint(len(train_df), size=8)
data = (train_df.iloc[random_sel,1:].values.reshape(-1,1,28,28)/255.)
grid = make_grid(torch.Tensor(data), nrow=8)
plt.rcParams['figure.figsize'] = (16, 2)
plt.imshow(grid.numpy().transpose((1,2,0)))
plt.axis('off')
plt.show()
print(*list(train_df.iloc[random_sel, 0].values), sep = ', ')
```
輸出結果有一個圖片:

以及一行列印:

隨機挑選了8個樣本進行視覺化,然後打印出來的是樣本對應的標籤值。
### 1.3 類別是否均衡
然後我們需要檢查一下訓練樣本中類別是否均衡,利用直方圖來檢查:
```python
# 檢查類別是否不均衡
plt.figure(figsize=(8,5))
plt.bar(train_df['label'].value_counts().index, train_df['label'].value_counts())
plt.xticks(np.arange(n_class))
plt.xlabel('Class', fontsize=16)
plt.ylabel('Count', fontsize=16)
plt.grid('on', axis='y')
plt.show()
```
輸出影象:
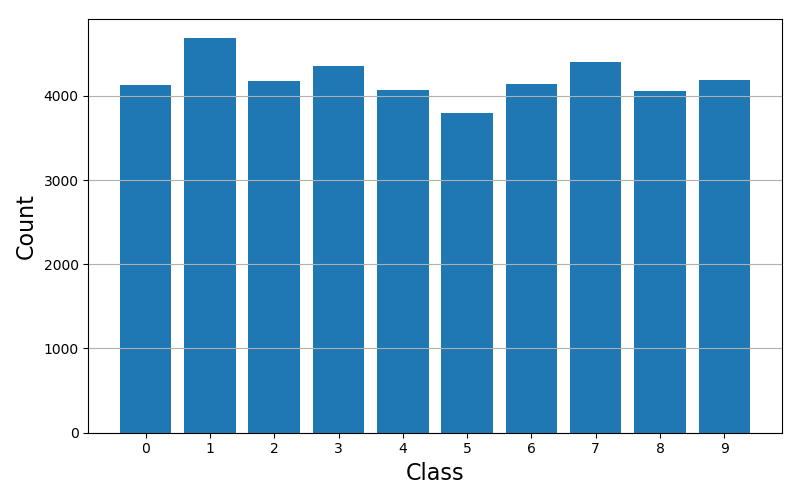
基本沒毛病,是均衡的。
## 2 訓練與推理
### 2.1 構建dataset
我們可以重新寫一個python指令碼,首先還是匯入庫和讀取檔案:
```python
import pandas as pd
train_df = pd.read_csv('./MNIST_csv/train.csv')
test_df = pd.read_csv('./MNIST_csv/test.csv')
n_train = len(train_df)
n_test = len(test_df)
n_pixels = len(train_df.columns) - 1
n_class = len(set(train_df['label']))
```
然後構建一個Dataset,Dataset和Dataloader的知識前面的課程已經講過了,這裡直接構建一個:
```python
import torch
from torch.utils.data import Dataset,DataLoader
from torchvision import transforms
class MNIST_data(Dataset):
def __init__(self, file_path,
transform=transforms.Compose([transforms.ToPILImage(), transforms.ToTensor(),
transforms.Normalize(mean=(0.5,), std=(0.5,))])
):
df = pd.read_csv(file_path)
if len(df.columns) == n_pixels:
# test data
self.X = df.values.reshape((-1, 28, 28)).astype(np.uint8)[:, :, :, None]
self.y = None
else:
# training data
self.X = df.iloc[:, 1:].values.reshape((-1, 28, 28)).astype(np.uint8)[:, :, :, None]
self.y = torch.from_numpy(df.iloc[:, 0].values)
self.transform = transform
def __len__(self):
return len(self.X)
def __getitem__(self, idx):
if self.y is not None:
return self.transform(self.X[idx]), self.y[idx]
else:
return self.transform(self.X[idx])
```
可以看到,這個dataset中,根據是否有標籤分成返回兩個不同的值。(訓練集的話,同時返回資料和標籤,測試集中僅僅返回資料)。
```python
batch_size = 64
train_dataset = MNIST_data('./MNIST_csv/train.csv',
transform= transforms.Compose([
transforms.ToPILImage(),
transforms.RandomRotation(degrees=20),
transforms.ToTensor(),
transforms.Normalize(mean=(0.5,), std=(0.5,))]))
test_dataset = MNIST_data('./MNIST_csv/test.csv')
train_loader = torch.utils.data.DataLoader(dataset=train_dataset,
batch_size=batch_size, shuffle=True)
test_loader = torch.utils.data.DataLoader(dataset=test_dataset,
batch_size=batch_size, shuffle=False)
```
關於這段程式碼:
- 構建了一個train的dataset和test的dataset,然後再分別構建對應的dataloader
- train_dataset中使用了隨機旋轉,因為這個函式是作用在PIL圖片上的,所以需要將資料先轉成PIL再進行旋轉,然後轉成Tensor做標準化,這裡標準化就隨便選取了0.5,有需要的可以做進一步的更改。
- 需要注意的是,轉成PIL之前的資料是numpy的格式,所以資料應該是$W\times H \times C$的形式,因為這裡是單通道影象,所以資料的shape為:(72000,28,28,1).(72000為樣本數量)
- 像是旋轉、縮放等影象增強方法在訓練集中才會使用,這是增強模型訓練難度的操作,讓模型增加魯棒性;在測試集中常規情況是不使用旋轉、縮放這樣的影象增強方法的。**(訓練階段是讓模型學到內容,測試階段主要目的是提高預測的準確度,這句話感覺是廢話。。。)**
### 2.2 構建模型類
```python
import torch.nn as nn
class Net(nn.Module):
def __init__(self):
super(Net, self).__init__()
self.features1 = nn.Conv2d(1, 32, kernel_size=3, stride=1, padding=1)
self.features = nn.Sequential(
nn.BatchNorm2d(32),
nn.ReLU(inplace=True),
nn.Conv2d(32, 32, kernel_size=3, stride=1, padding=1),
nn.BatchNorm2d(32),
nn.ReLU(inplace=True),
nn.MaxPool2d(kernel_size=2, stride=2),
nn.Conv2d(32, 64, kernel_size=3, padding=1),
nn.BatchNorm2d(64),
nn.ReLU(inplace=True),
nn.Conv2d(64, 64, kernel_size=3, padding=1),
nn.BatchNorm2d(64),
nn.ReLU(inplace=True),
nn.MaxPool2d(kernel_size=2, stride=2)
)
self.classifier = nn.Sequential(
nn.Dropout(p=0.5),
nn.Linear(64 * 7 * 7, 512),
nn.BatchNorm1d(512),
nn.ReLU(inplace=True),
nn.Dropout(p=0.5),
nn.Linear(512, 512),
nn.BatchNorm1d(512),
nn.ReLU(inplace=True),
nn.Dropout(p=0.5),
nn.Linear(512, 10),
)
for m in self.modules():
if isinstance(m, nn.Conv2d) or isinstance(m, nn.Linear):
nn.init.xavier_uniform_(m.weight)
elif isinstance(m, nn.BatchNorm2d):
m.weight.data.fill_(1)
m.bias.data.zero_()
def forward(self, x):
x = self.features1(x)
x = self.features(x)
x = x.view(x.size(0), -1)
x = self.classifier(x)
return x
```
這個模型類整體來看中規中矩,都是之前講到的方法。**小測試:還記得xavier初始化時怎麼回事嗎?xavier初始化方法是一個非常常用的方法,在之前的文章中也詳細的推導了這個。**
之後呢,我們對模型例項化,然後給模型的引數傳到優化器中,然後設定一個學習率衰減的策略,**學習率衰減就是訓練的epoch越多,學習率就越低的這樣一個方法,在後面的文章中會詳細講述** 。
```python
import torch.optim as optim
device = 'cuda' if torch.cuda.is_available() else 'cpu'
model = Net().to(device)
# model = torchvision.models.resnet50(pretrained=True).to(device)
optimizer = optim.Adam(model.parameters(), lr=0.003)
criterion = nn.CrossEntropyLoss().to(device)
exp_lr_scheduler = optim.lr_scheduler.StepLR(optimizer, step_size=7, gamma=0.1)
print(model)
```
執行結果自然是把整個模型打印出來了:
```python
Net(
(features1): Conv2d(1, 32, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(features): Sequential(
(0): BatchNorm2d(32, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(1): ReLU(inplace=True)
(2): Conv2d(32, 32, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(3): BatchNorm2d(32, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(4): ReLU(inplace=True)
(5): MaxPool2d(kernel_size=2, stride=2, padding=0, dilation=1, ceil_mode=False)
(6): Conv2d(32, 64, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(7): BatchNorm2d(64, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(8): ReLU(inplace=True)
(9): Conv2d(64, 64, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(10): BatchNorm2d(64, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(11): ReLU(inplace=True)
(12): MaxPool2d(kernel_size=2, stride=2, padding=0, dilation=1, ceil_mode=False)
)
(classifier): Sequential(
(0): Dropout(p=0.5, inplace=False)
(1): Linear(in_features=3136, out_features=512, bias=True)
(2): BatchNorm1d(512, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(3): ReLU(inplace=True)
(4): Dropout(p=0.5, inplace=False)
(5): Linear(in_features=512, out_features=512, bias=True)
(6): BatchNorm1d(512, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(7): ReLU(inplace=True)
(8): Dropout(p=0.5, inplace=False)
(9): Linear(in_features=512, out_features=10, bias=True)
)
)
```
### 2.3 訓練模型
```python
def train(epoch):
model.train()
for batch_idx, (data, target) in enumerate(train_loader):
# 讀入資料
data = data.to(device)
target = target.to(device)
# 計算模型預測結果和損失
output = model(data)
loss = criterion(output, target)
optimizer.zero_grad() # 計算圖梯度清零
loss.backward() # 損失反向傳播
optimizer.step()# 然後更新引數
if (batch_idx + 1) % 50 == 0:
print('Train Epoch: {} [{}/{} ({:.0f}%)]\tLoss: {:.6f}'.format(
epoch, (batch_idx + 1) * len(data), len(train_loader.dataset),
100. * (batch_idx + 1) / len(train_loader), loss.item()))
exp_lr_scheduler.step()
```
先定義了一個訓練一個epoch的函式,然後下面是訓練10個epoch的主函式程式碼。
```python
log = [] # 記錄一下loss的變化情況
n_epochs = 2
for epoch in range(n_epochs):
train(epoch)
# 把log化成折線圖
import matplotlib.pyplot as plt
plt.plot(log)
plt.show()
```
**注意注意**,這時候會報一個錯誤,我們來看一下,我詳細標註了我個人看報錯時候的一個習慣:

這時候我大概可以猜到,因為我們這個圖片是灰度圖片,是單通道的,可能這個RandomRotate函式要求輸入圖片是3個通道的(這個官方API上也沒有細說),怎麼辦呢?完全可以直接在轉成PIL格式之前,把numpy的那個(72000,28,28,1)複製第四維度,變成(72000,28,28,3).但是這裡我想用上一節課教的一個方法```torchvision.transforms.GrayScale(num_output_channels)```, **活學活用嘛**.
所以把train_dataset那一塊改成:
```python
train_dataset = MNIST_data('./MNIST_csv/train.csv',
transform= transforms.Compose([
transforms.ToPILImage(),
transforms.Grayscale(num_output_channels=3),
transforms.RandomRotation(degrees=20),
transforms.ToTensor(),
transforms.Normalize(mean=(0.5,), std=(0.5,))]))
test_dataset = MNIST_data('./MNIST_csv/test.csv',
transform=transforms.Compose([
transforms.ToPILImage(),
transforms.Grayscale(num_output_channels=3),
transforms.ToTensor(),
transforms.Normalize(mean=(0.5,), std=(0.5,))]))
```
然後不要忘記把模型類中的第一個卷積層的輸入通道改成3哦~
```python
# self.features1 = nn.Conv2d(1, 32, kernel_size=3, stride=1, padding=1)
self.features1 = nn.Conv2d(3, 32, kernel_size=3, stride=1, padding=1)
```
然後重新執行程式碼,發現可以正常訓練了,列印輸出的部分截圖如下:
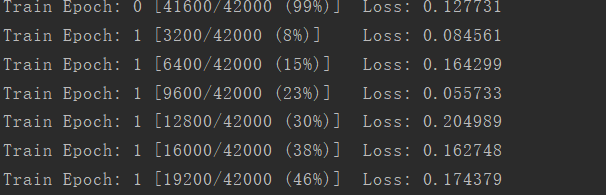
然後看一下損失下降的情況,算是收斂了,訓練的epoch更多應該會更好:
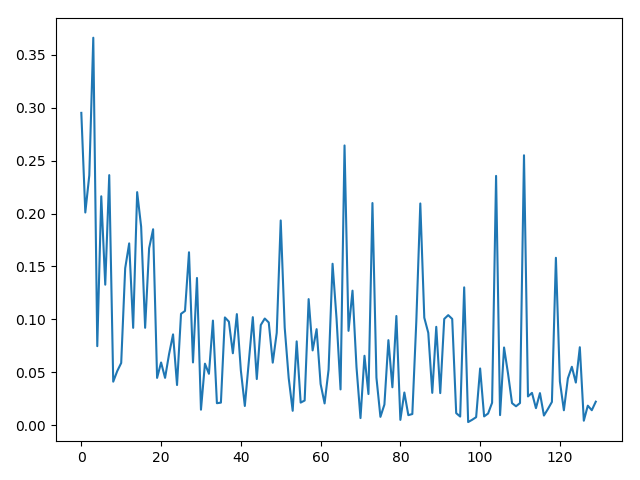
發現訓練是收斂的。這裡需要注意的是,現在用全部的資料進行訓練,沒有使用驗證集的做法,是有可能過擬合情況出現的(但是這裡只是訓練了10個epoch應該不會過擬合),**更穩妥的做法是把資料分成訓練集和驗證機(可以是2:1,3:1,4:1)都可以,4:1比較常用,這也就是n-fold的方法。** 在之後的學習中會詳細介紹這個,不過這個知識點也不難,也可以自行查閱。
### 2.4 推理預測
```python
def prediciton(data_loader):
model.eval()
test_pred = torch.LongTensor()
for i, data in enumerate(data_loader):
data = data.to(device)
output = model(data)
pred = output.cpu().data.max(1, keepdim=True)[1]
test_pred = torch.cat((test_pred, pred), dim=0)
return test_pred
test_pred = prediciton(test_loader)
```
類似trian,寫一個預測的函式,返回預測的值。然後像是在EDA中那樣,抽取測試集的8個數字,看看影象和預測結果的匹配情況
```python
from torchvision.utils import make_grid
random_sel = np.random.randint(len(test_df), size=8)
data = (test_df.iloc[random_sel,:].values.reshape(-1,1,28,28)/255.)
grid = make_grid(torch.Tensor(data), nrow=8)
plt.rcParams['figure.figsize'] = (16, 2)
plt.imshow(grid.numpy().transpose((1,2,0)))
plt.axis('off')
plt.show()
print(*list(test_pred[random_sel].numpy()), sep = ', ')
```
輸出影象是:

列印輸出:

OK了,恭喜你,完成了MNIST手寫數字集的