
《Deep Learning》第二章 線性代數 筆記
第二章 線性代數
2.1 名詞
標量(scalar)、向量(vector)、矩陣(matrix)、張量(tensor)
2.2 矩陣和向量相乘
1. 正常矩陣乘法; 2. 向量點積; 3. Hadamard乘積(元素對應乘積)
矩陣乘法服從分配律、結合律,兩個向量的點積滿足交換律,利用兩個向量點積的結果是標量(scalar),標量轉置是自身。
2.3 單位矩陣和逆矩陣
逆矩陣一般作為理論工具使用,計算機由於精度不足,一般不使用逆矩陣。
2.4 線性相關和生成子空間
線性方程組,解的個數:0、1、∞,不存在有限多個解的情況。
線性方程組,只有方陣,且是非奇異的(所有列向量線性無關)才能用逆矩陣求解。
2.5 範數(norm)
將向量對映到非負值的函式(衡量向量到原點的距離),滿足距離三要素。
範數分為x範數和Lx範數,例如L2被稱為歐幾里得範數。
L0範數(在數學意義上是不對的):非零元素數目個數。
L1範數:常用於資料集中於原點附近;零和非零元素差異非常重要;非零元素數目的替代函式(因為L0範數對向量縮放無感知)
L2範數:歐幾里得範數,其平方值常用於衡量向量的大小,可以簡單的通過點積運算。(在原點附近增長的十分緩慢,此時推薦用L1範數)
L∞範數:最大範數,最大的元素的絕對值,即||x||∞=maxi(|xi|)
Frobenius範數:常用於衡量矩陣的大小,在深度學習中的最常見做法,計算矩陣每個元素的平方和後 開方,類似於向量的L2
2.6 特殊型別的矩陣和向量
單位向量(unit vector)是具有單位範數(unit norm)的向量:||x||2=1(歐幾里得距離為1)。
如果兩個向量不僅相互正交(點積為0)且範數為1,稱為標準正交(orthonormal)。
正交矩陣(orthogonal matrix):行向量和列向量分別是標準正交的方陣。
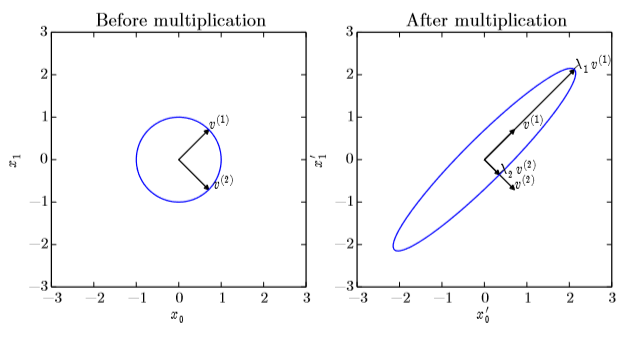
2.7 特徵分解
將矩陣分解為特徵值 λ 和特徵向量的表示形式。(一般只有方陣才有)
可以看作在二維平面上畫出特徵向量後,乘上矩陣A表示這個向量被拉伸了 λ 倍,如下圖:
λ > 0:正定矩陣(positive definite)
λ ≥ 0:半正定矩陣(positive semidefinite)
λ < 0:負定矩陣(negative definite)
2.8 奇異值分解 SVD
這裡書裡講的不是很清楚,推薦一個視訊:https://www.bilibili.com/video/av15971352
博主先在這裡說說自己對SVD的理解:就是
提取矩陣的特徵,按特徵的重要程度從大到小排序,每個特徵的權重就是奇異值,特徵本身就是奇異向量,當保留權重較大的幾個特徵時,能夠很好地還原出原矩陣。
因為非方陣的矩陣無法計算逆矩陣,所以無法進行特徵分解,故提出了奇異值分解(singular value decomposition)。
每個實數矩陣都有一個奇異值分解,但不一定都有特徵值分解。(例如,非方陣的矩陣沒有特徵分解,這時只能用奇異值分解)。
且奇異值分解有著更廣泛的應用(例如特徵降維,矩陣去噪)。
博主對原理的理解:SVD就是分別計算ATA和AAT,讓其變成方陣,然後對角化,從對角化後的資訊中提取特徵,經過轉換後作為奇異值,從而復原矩陣A。
2.9 Moore-Penrose偽逆(廣義逆矩陣)
A+=VD+UT
U,D和V是矩陣A奇異值分解(SVD)後得到的矩陣,對角矩陣D的偽逆D+是其非零元素取倒數之後再轉置得到的。
當矩陣A的列數多於行數(矮胖)時,用偽逆求解線性方程是眾多可能解法中的一種。但是x=A+y是方程所有可行解中歐幾里得範數L2最小的一個。
當行數多於列數時,可能沒有解(因為沒有滿秩),在這種情況下,通過偽逆得到的x使得Ax和y的歐幾里得距離||Ax-y||2最小。
(這部分沒怎麼查資料,暫時不知道其在機器學習中的應用)
2.10 跡運算
沒什麼好說的,對角線元素的和,以下是跡運算的性質:
一個矩陣的轉置不影響跡的大小;
多個矩陣相乘,將最後一個挪到最前面之後,跡是相同的( Tr(ABC)=Tr(CAB)=Tr(BCA) )。
標量在跡運算後仍然是它自己。a=Tr(a);
迴圈置換後矩陣形狀變了,也不影響跡的大小。
2.11 行列式
det(A)等於矩陣特徵值的乘積,用來衡量矩陣參與矩陣乘法後空間擴大或者縮小了多少。
2.12 例項:主成分分析 PCA
關鍵詞:單位範數、L2範數、最優化問題、向量微積分、Frobenius範數……
這塊有點困難,之後補上。