
Matlab機器人工具箱
機器人工具箱的下載和安裝
機器人工具箱下載地址:http://petercorke.com/wordpress/toolboxes/robotics-toolbox#Downloading_the_Toolbox
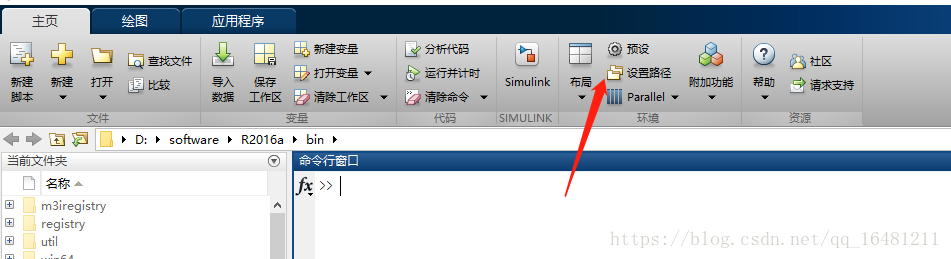
下載好解壓之後將資料夾放到matlab路徑的ToolBox資料夾內,然後到matlab介面的設定路徑下新增資料夾及其子檔案。
之後在matlab的命令列執行startup_rvc進行安裝。
安裝結束後輸入ver檢視是否可以找到 Robotics Toolbox。
具體操作可以參考該連結:https://blog.csdn.net/u011831805/article/details/81044546
機器人工具箱的簡單使用
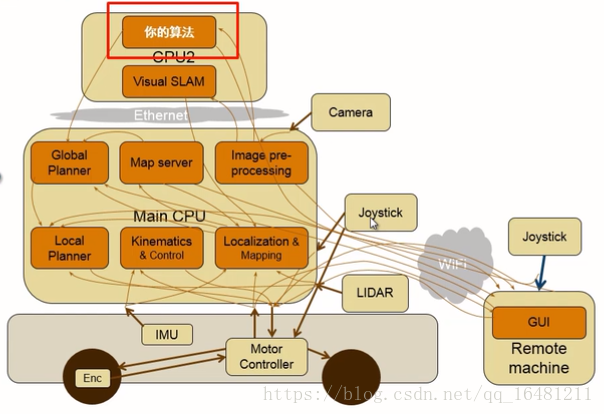
由於一個機器人包含的技術和任務太多,所以我們為了在之前的理論技術上開發新的演算法就需要藉助matlab工具箱來幫我們提高效率。
輸入
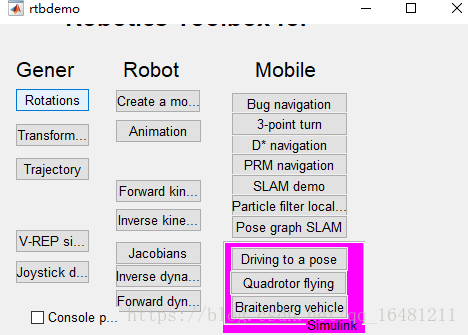
rtbdemo
可以看到一個列表
我們可以執行看一下演示效果。
相關推薦
Matlab機器人工具箱
機器人工具箱的下載和安裝 機器人工具箱下載地址:http://petercorke.com/wordpress/toolboxes/robotics-toolbox#Downloading_the_Toolbox 下載好解壓之後將資料夾放到matlab路徑的ToolBox資料夾內,然
Matlab機器人工具箱學習9.10
MATLAB機器人工具箱9.10操作 根據以前幾位大神釋出的帖子,自行安裝MATLAB機器人工具箱。 1. 首先安裝機器人工具箱 我安裝的是9.10,將工具箱資料夾拷貝到toolbox目錄下,然後設定為路徑,儲存。 2. 在命令中輸入statrup_rvc
基於MATLAB機器人工具箱的KUKA youBot機械臂運動學建模——DH法
以實驗室的KUKA youBot五自由度機械臂為切入點,記得當時和實驗室的同學在這上面花費了好長時間,最後也沒搞定,而這又算是基礎中的基礎,不能忽視。DH一般分為標準DH和改進的DH,以John J.Craig的《機器人學導論》來說,它的是Modified D
Robotics Toolbox 給matlab軟體安裝機器人工具箱
1、安裝包下載 解壓後可以看到有三個檔案,第一個是工具箱的安裝文件,第二個是說明文件,第三個是簡略的安裝說明: 2、將“rvctools”檔案放到MATLAB安裝目錄下的“toolbox”資料夾中 比如我MATLAB裝在了E盤的Program Files中: E
matlab calibration toolbox-Matlab標定工具箱使用(單目標定和雙目標定)
轉載自:https://blog.csdn.net/kaspar1992/article/details/54344965 英文網址: http://www.vision.caltech.edu/bouguetj/calib_doc/index.html#examples http://
MATLAB-Robotics工具箱(2)座標變換和軌跡規劃
在理解關節機器人運動學原理的基礎上用MATLAB開始做機器人的運動學模擬1.關節引數 要在MATLAB建立機器人物件,首先要了解D-H引數,利用工具箱的LINK和ROBOT函式建立物件。 LINK函式 L = LINK([alpha A theta D]) L
Matlab統計工具箱中各類概率分佈函式使用方法介紹
1. Matlab Statistics Toolbox 中概率分佈函式介紹 Matlab Statistics Toolbox 提供了對幾乎所有概率分佈的支援,可以方便產生服從各類分佈的隨機數及其PDF/CDF 函式。
Matlab優化工具箱(optimization toolbox)使用時出現的一個問題
上次在筆記本上用Matlab2010b的優化工具箱學習遺傳演算法求解器的操作時,出現了一個非常鬱悶的問題: 按照書上的步驟,我設定適應函式,變數個數,其他引數預設的情況下,點選開始按鈕,提示框出現‘Optimization running.Too many
MATLAB優化工具箱使用
轉自 http://blog.163.com/bingqingyujie..5/blog/static/755593612009103074651921/ 1 工具箱概述 1.1 功能 (1)求解無約束條件非線性極小值; (2)求
Matlab YALMIP工具箱
定義變數: sqdvar()實型 intvar()整型 binvar()0-1型 設定目標函式 : f=目標函式 設定限定條件: F=set(限定條件) 多個限定條件用加號相連: F=set(限定條件)+set(限定條件1)+set(限定條件2)⋯⋯ 求解: solvesd
機器人工具箱 V9.10(Robotics Toolbook) (1):建立機器人模型
機器人學工具箱(Robotics Toolbook for Matlab) 是matlab中專門用於機器人模擬的工具箱,在機器人建模、軌跡規劃、控制、視覺化方面使用非常方便。 建立機器人的兩個最重要的函式是:Link和Seriallink Link類
遺傳演算法(四)MATLAB GA工具箱使用 附解TSP問題
基本使用 1. 直接參見函式ga 函式原型:[x fval] = ga(@fitnessfun, nvars, options) x是使fitnessfun函式取最小值使的自變數值。nvars為自變數的數目即x向量中包含的元素個數,option
matlab SVM工具箱安裝和使用
1.安裝辦法 下載地址:http://see.xidian.edu.cn/faculty/chzheng/bishe/indexfiles/indexl.htm 在命令視窗輸入以下命令:(路徑根據自己的情況來調整) cd 'D:\Program Files\MATLAB\
Matlab資料庫工具箱的簡單使用
Database Toolbox 2和關係資料庫進行資料交換Database 工具箱可以使你使用MATLAB 的資料分析和視覺化工具對存 儲在資料庫中的資料進行分析。在MATLAB 工作環境中, 您可以使用結構化查詢語言進行: ■ 對資料庫中的資料進行讀寫■ 使用約束條
機械臂(1)——機器人工具箱的獲取安裝
最近準備研究下機械臂的你運動分析,本文記錄相關過程。 1、首先獲取機器人工具,可直接到官網下載http://www.petercorke.com/Robotics_Toolbox.html,幾個月
Matlab常用工具箱的呼叫命令
1.優化工具箱 用途:優化問題 呼叫命令:在CommandWindow輸入“optimtool”,其視窗如下 圖1Optimization Tool 2. 神經網路工具箱 用途:資料擬合、模式識別和分類、聚類、動態時間序列規劃 呼叫命令:在Command
Matlab 資料庫工具箱函式
看了下資料庫函式的書,對於資料來源的配置,還有設定之類的,感覺還是不會。 加強點對函式的記憶,與用法吧。 一般將資料來源配好後,為了將資料庫連線到matlab conna=database(‘datasourcename’,'A','B')-----------datas
1、matlab機器人運動學計算
一、兩連桿機器人 1.Link Link()是構建連桿的基本函式 建立連桿的基本規則是 L = Link(DH, OPTIONS) DH = [THETA D A ALPHA SIGMA OFFSET] THETA D A ALPHA 為基
Matlab資料庫工具箱
對於在Matlab中使用資料庫,網上有很多,自己剛學習,和大家分享一下。 1. 配置資料來源 (1).“控制面板”----“管理工具”——“資料來源(ODBC)”——“新增”——“建立資料來
MATLAB(1)基於遺傳演算法解決最優化問題及相應的MATLAB遺傳工具箱使用
對於取最小值的最優化問題,遺傳演算法借鑑生物遺傳現象使具有一定數量的候選解的種群向更好的解進化,該方法是通過種群進化,使得適應度函式代入估計引數後達到最值來得到最優解。借鑑生物種群的進化,遺傳演算法先隨機產生一組初始解,作為初始種群,以數值解為例,這些解都是通過二進位制程式碼儲存在計算機中,類似於染