
[機器視覺] SIFT特徵-尺度不變特徵理解
SIFT特徵-尺度不變特徵理解
簡介
SIFT,即尺度不變特徵變換(Scale-invariant feature transform,SIFT),是用於影象處理領域的一種描述。這種描述具有尺度不變性,可在影象中檢測出關鍵點,是一種區域性特徵描述子。該方法於1999年由David Lowe首先發表於計算機視覺國際會議(International Conference on Computer Vision,ICCV),2004年再次經David Lowe整理完善後發表於International journal of computer vision(IJCV)。截止2014年8月,該論文單篇被引次數達25000餘次。

特點
- 對旋轉、尺度縮放、亮度變化保持不變性,對視角變化、噪聲等也存在一定程度的穩定性
- 獨特性,資訊量豐富,適用於在海量特徵資料中進行快速,準確的匹配
- 多量性,即使少數幾個物體也可以產生大量的Sfit特徵向量
- 可擴充套件性,可以很方便的與其他形式的特徵向量進行聯合
高斯影象金字塔
理解
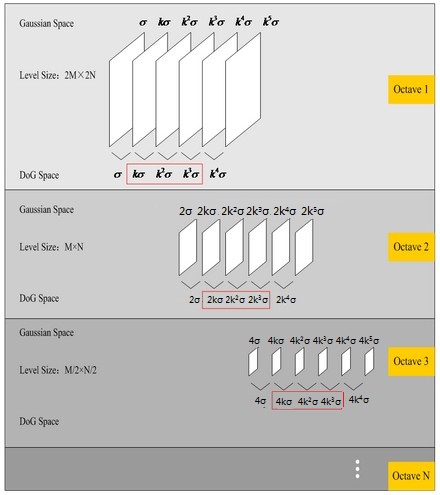
高斯影象金字塔是把原影象先放大一倍(如150✖150到300✖300),對這個放大後的影象進行高斯濾波(之前講過的高斯模糊,可以回去看一下),其中模糊半徑分別取σ、kσ、k^2σ等等,得到若干個模糊後的影象,這是第一組,然後依次按照比例為2縮小影象,如此重複,構建一個有若干組(Octave)的金字塔,每組分為若干層。
補充
用O表示octave(第幾組),用L表示layer(第幾層),則(O,L)就代表高斯影象空間中的確定的一副影象。
DOG金字塔
理解
DOG金字塔(Difference of Gaussian)就是高斯金字塔同一octave下相鄰兩層的差分構成的金字塔。

解釋
之所以要構建差分金字塔,就是為了找到在不同尺度和不同模糊程度下的不變特徵,而這正式SIFT要提取的"穩定"特徵。
空間極值點檢測
理解
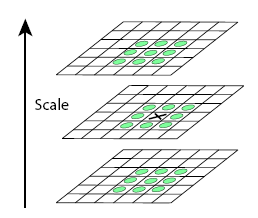
這裡的空間極值點檢測,其實就是在DOG空間的一個octave下比較每一個畫素和它相鄰點的大小,看它是否比其他點都要大。如果比周圍點都大,說明它是是區域性的極值點(這一點我們可以類比一個二次函式,它的最低點是不是比周圍點都小,所以它是極值點,當然它也恰巧是最低點)。
補充
這裡我們要計算圖中打x的點是不是極值點,那麼我們就要比較它與不同層以及同層的周圍一共26個點的大小,才能確定它是不是空間的極值點。
關鍵點精確定位
理解
由於我們上面的操作都是在離散空間操作的,我們知道,離散空間取到的極值點,並不一定是真正的極值點,所以我們需要通過類似函式擬合的方式,對離散點進行擬合使之連續,在連續空間就很容易利用我們的知識求取極值點。

計算
我們將DOG空間的泰勒展開式子看成其擬合函式,就可以操作連續空間的函數了。
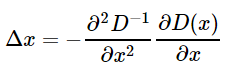
候選特徵點x,其偏移量定義為Δx,其對比度為D(x)的絕對值∣D(x)∣,對D(x)應用泰勒展開式

由於x是D(x)的極值點,所以對上式求導並令其為0,得到
然後再把求得的Δx代入到D(x)的泰勒展開式中

設對比度的閾值為T,若∣D(x^)∣≥T,則該特徵點保留,否則剔除掉。
關鍵方向匹配
理解
上面說了,SIFT特徵具有旋轉不變性,而它的旋轉不變性就在於每一個關鍵點都有一個基準方向,而這個基準方向是由影象的區域性決定和分配的。
計算
梯度的模值和方向定義如下:


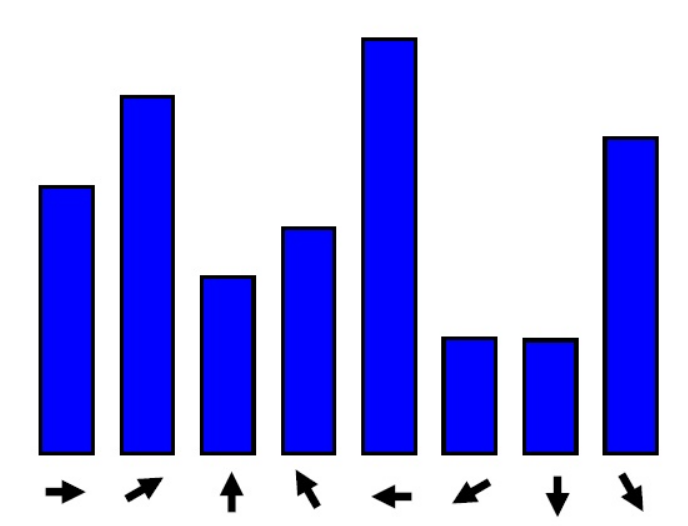
利用這個公式計算以關鍵點為中心的領域內所有點的梯度方向(8個方向),計算完之後,我們使用直方圖來統計領域內畫素的梯度和方向。梯度直方圖將0~360度的方向分為36個立柱,每柱10度。直方圖的峰值代表的是該關鍵點的主方向。為了增強魯棒性,如果由立柱的值大於峰值的80%,我們將其作為關鍵點的輔方向。(下圖只花了8個方向)。
關鍵點描述
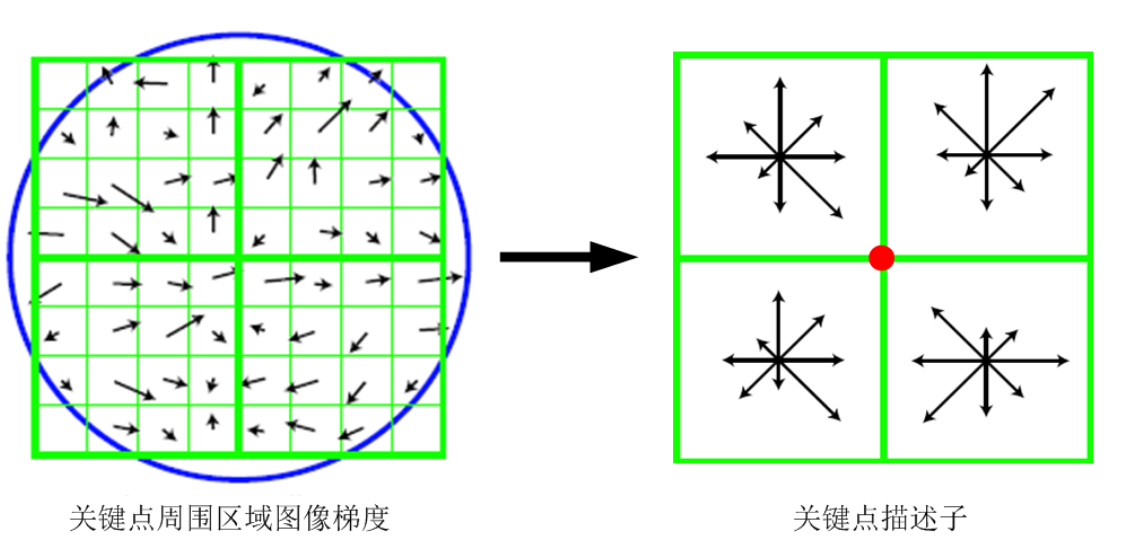
理解
關鍵點描述是對領域內高斯影象直方圖統計結果的一種表示形式,我們找到的特徵點引數有位置、尺度和方向。在關鍵點周圍的領域內,將其分為m✖m個子塊,每個子塊以中間點為原點,分別計算梯度直方圖,生成區域性向量,對該向量進行標準高斯函式加權處理,然後對特徵向量進行歸一化處理。每個關鍵點在下圖中可以產生2✖2✖8維向量作為特徵向量。
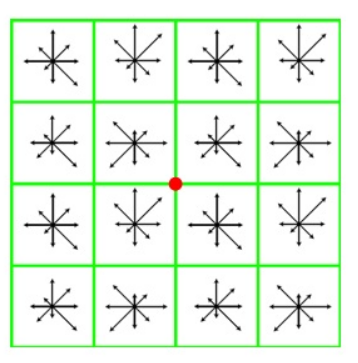
David G.Lowed的實驗結果表明:對每個關鍵點,採用448共128維向量的描述子進項關鍵點表徵,綜合效果最佳:
特徵點匹配
理解
有了目標圖片,對目標圖片計算SIFT特徵,然後用其特徵向量與已知特徵的特徵向量進行歐式距離匹配,其歐式距離越小,匹配度越高。