
攝像機標定的畸變型別
轉載於:https://blog.csdn.net/xiong452980729/article/details/49964265
一、相機畸變
定義:相機鏡頭的畸變實際上是光學透鏡固有的透視失真的總稱。
相機畸變的分類:
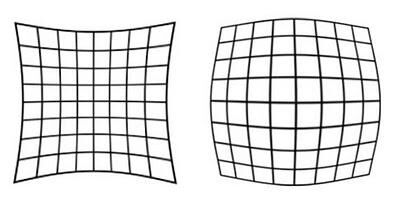
1、枕形畸變:又稱鞍形形變,視野中邊緣區域的放大率遠大於光軸中心區域的放大率,常用在遠攝鏡頭中(下圖左);
2、桶形畸變,與枕形畸變相反,視野中光軸中心區域的放大率遠大於邊緣區域的放大率,常出現在廣角鏡頭和魚眼鏡頭中(下圖中);
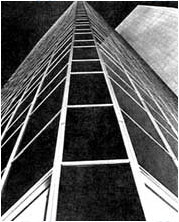
3、線性畸變:光軸與相機所拍攝的諸如建築物類的物體的垂平面不正交,則原本應該平行的遠端一側和近端一側,以不相同的角度匯聚產生畸變。這種畸變本質上是一種透視變換,即在某一特定角度,任何鏡頭都會產生相似的畸變(下圖右)。
二、相機的畸變模型
相機的針孔模型,只是真實相機的一個近似,由於存在各種鏡頭的畸變和變形,所以真實的相機要比模型複雜的多。在引入各種非線性的畸變修正之後,就形成看複雜的非線性成像模型。鏡頭的畸變主要分為徑向畸變、離心畸變和薄稜鏡畸變三類。
2.1 徑向畸變
定義:使像點產生徑向位置的偏差。徑向畸變又分為正向畸變和負向畸變,正向畸變稱為枕形畸變,負向畸變稱為桶形畸變;
特點:由鏡頭的形狀缺陷所造成的畸變,關於相機主光軸對稱。
數學模型:

其中,

若令

2.2 離心畸變
定義:光學系統的光學中心和幾何中心不一致(鏡頭各器件的光學中心)所造成的畸變;
特點:既包含徑向畸變,又包含鏡頭主光軸不對稱多造成的切向畸變。
數學模型:

p1,p2為切向畸變係數。
2.3 薄稜鏡畸變
定義:鏡頭設計缺陷與加工安裝誤差所造成;
特點:同時引起徑向畸變和切向畸變,高價位鏡頭可以忽略薄稜鏡畸變。
數學模型:
s1,s2為薄稜鏡畸變係數。
2.4 總結
由於影象點存在偏差,所以在建模時需要進行相應的畸變補差。實際影象點的座標為

實際計算中可以只考慮每種計算的前兩階畸變係數。