
空間座標系統
阿新 • • 發佈:2018-12-29
ROS tf的規則
其中,
- 等號左邊:turtle2在turtle1座標系下的
姿態。 - 等號右邊第一項:turtle1在世界座標系world中的
姿態的逆。 - 等號右邊第二項:turtle2在世界座標系world中的
姿態。
- 等號左邊:turtle2在turtle1座標系下的
命令列中觀測座標變換資料的約定
$ rosrun tf tf_echo world turtle1
# 這將得到turtle1在世界座標系world中的姿態。思考空間座標變換的方法:基底
以下圖為例(影象來自SVO官網wiki)。
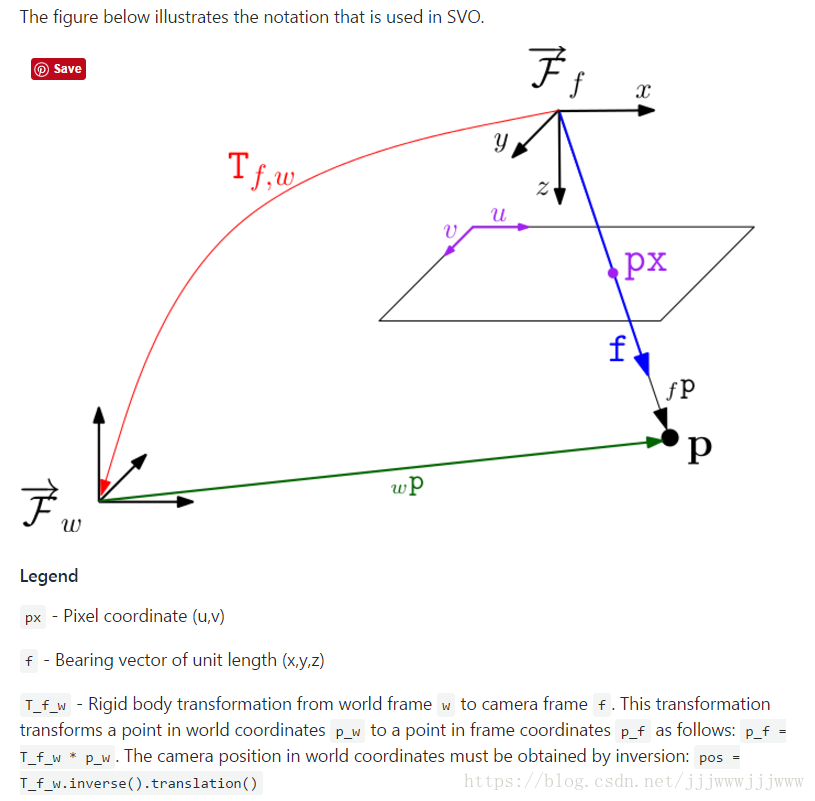
這裡,假定相機座標系
所在的向量空間的基底為
,世界座標系
所在的向量空間的基底為
。則座標變換的生成方式為:
此時,若 為空間某一點在世界座標系 中的座標, 為該點在相機座標系 中對應的座標,則有:
從而,
同理,
則相機原點在世界座標系
中的座標值(即通常說的相機的位置)是:
其中, 是齊次座標 ,其值為零表示相機座標系 的座標原點,也即相機的位置, 。
是變換矩陣 的平移部分。