
Linux SPI匯流排和裝置驅動架構之二:SPI通用介面層
通過上一篇文章的介紹,我們知道,SPI通用介面層用於把具體SPI裝置的協議驅動和SPI控制器驅動聯接在一起,通用介面層除了為協議驅動和控制器驅動提供一系列的標準介面API,同時還為這些介面API定義了相應的資料結構,這些資料結構一部分是SPI裝置、SPI協議驅動和SPI控制器的資料抽象,一部分是為了協助資料傳輸而定義的資料結構。另外,通用介面層還負責SPI系統與Linux裝置模型相關的初始化工作。本章的我們就通過這些資料結構和API的討論來對整個通用介面層進行深入的瞭解。
/*****************************************************************************************************/
宣告:本博內容均由
/*****************************************************************************************************/
SPI通用介面層的程式碼集中在:/drivers/spi/spi.c中。
SPI裝置模型的初始化
通常地,根據linux裝置模型的組織方式,各種裝置會掛在合適的總線上,裝置驅動和裝置通過匯流排互相進行匹配,使得裝置能夠找到正確的驅動程式進行控制和驅動。同時,性質相似的裝置可以歸為某一個類的裝置,它們具有某些共同的裝置屬性,在裝置模型上就是所謂的class。SPI裝置也不例外,它們也遵循linux的裝置模型的規則:
可見,在初始化階段,spi_init函式向系統註冊了一個名為spi的匯流排型別,同時也為SPI控制器註冊了一個名為spi_master的裝置類。這樣,以後在sysfs中就會出現以下兩個檔案節點:struct bus_type spi_bus_type = { .name = "spi", .dev_attrs = spi_dev_attrs, .match = spi_match_device, .uevent = spi_uevent, .pm = &spi_pm, }; static struct class spi_master_class = { .name = "spi_master", .owner = THIS_MODULE, .dev_release = spi_master_release, }; static int __init spi_init(void) { int status; buf = kmalloc(SPI_BUFSIZ, GFP_KERNEL); ...... status = bus_register(&spi_bus_type); ...... status = class_register(&spi_master_class); ...... return 0; ...... } postcore_initcall(spi_init);
- sys/bus/spi
- sys/class/spi_master
spi_master結構
SPI控制器負責按照設定的物理訊號格式在主控和spi裝置之間交換資料,SPI控制器資料是如何被傳輸的,而不關心資料的內容。SPI通用介面層用spi_master結構來表示一個spi控制器,我們看看它的主要欄位的意義:
| 欄位名稱 | 描述 |
|---|---|
| struct device dev | spi控制器對應的device結構 |
| struct list_head list | 系統可能有多個控制器,用該連結串列連結在一個全域性連結串列變數上 |
| s16 bus_num | 該控制器對應的spi匯流排編號,從0開始,通常由板級程式碼設定 |
| u16 num_chipselect | 連線到該spi控制器的片選訊號的個數 |
| u16 mode_bits | 工作模式,由驅動解釋該模式的意義 |
| u32 min_speed_hz | 最低工作時鐘 |
| u32 max_speed_hz | 最高工作時鐘 |
| u16 flags | 用於設定某些限制條件的標誌位 |
| int (*setup)(struct spi_device *spi) | 回撥函式,用於設定某個spi裝置在該控制器上的工作引數 |
| int (*transfer)(......) | 回撥函式,用於把包含資料資訊的mesg結構加入控制器的訊息連結串列中 |
| void (*cleanup)(struct spi_device *spi) | 回撥函式,當spi_master被釋放時,該函式被呼叫 |
| struct kthread_worker kworker | 用於管理資料傳輸訊息佇列的工作佇列執行緒 |
| struct kthread_work pump_messages | 具體實現資料傳輸佇列的工作佇列 |
| struct list_head queue | 該控制器的訊息佇列,所有等待傳輸的訊息佇列掛在該連結串列下 |
| struct spi_message *cur_msg | 當前正帶處理的訊息佇列 |
| int (*prepare_transfer_hardware)(......) | 回撥函式,正式發起傳送前會被呼叫,用於準備硬體資源 |
| int (*transfer_one_message)(......) | 單個訊息的原子傳送回調函式,佇列中的每個訊息都會呼叫一次該回調來完成傳輸工作 |
| int (*unprepare_transfer_hardware)(......) | 清理回撥函式 |
| int *cs_gpios | 片選訊號所用到的gpio |
spi_master結構通常由控制器驅動定義,然後通過以下通用介面層的API註冊到系統中:
- int spi_register_master(struct spi_master *master);
spi_device結構
SPI通用介面層用spi_device結構來表示一個spi裝置,它的各個欄位的意義如下:
| struct device dev | 代表該spi裝置的device結構 |
| struct spi_master *master | 指向該spi裝置所使用的控制器 |
| u32 max_speed_hz | 該裝置的最大工作時鐘頻率 |
| u8 chip_select | 在控制器中的片選引腳編號索引 |
| u16 mode | 裝置的工作模式,包括時鐘格式,片選訊號的有效電平等等 |
| u8 bits_per_word | 裝置每個單位資料所需要的位元數 |
| int irq | 裝置使用的irq編號 |
| char modalias[SPI_NAME_SIZE] | 該裝置的名字,用於spi匯流排和驅動進行配對 |
| int cs_gpio | 片選訊號的gpio編號,通常不用我們自己設定,介面層會根據上面的chip_select欄位在spi_master結構中進行查詢並賦值 |
要完成向系統增加並註冊一個SPI裝置,我們還需要另一個數據結構:
struct spi_board_info {
char modalias[SPI_NAME_SIZE];
const void *platform_data;
void *controller_data;
int irq;
u32 max_speed_hz;
u16 bus_num;
u16 chip_select;
u16 mode;
};- struct spi_device *spi_new_device(struct spi_master *master, struct spi_board_info *chip);
- int spi_register_board_info(struct spi_board_info const *info, unsigned n);
spi_driver結構
根據linux的裝置模型,有device就必定有driver與之對應,上一節介紹的spi_device結構中內嵌了device結構欄位dev,同樣地,代表驅動程式的spi_driver結構也內嵌了device_driver結構:
struct spi_driver {
const struct spi_device_id *id_table;
int (*probe)(struct spi_device *spi);
int (*remove)(struct spi_device *spi);
void (*shutdown)(struct spi_device *spi);
int (*suspend)(struct spi_device *spi, pm_message_t mesg);
int (*resume)(struct spi_device *spi);
struct device_driver driver;
};int spi_register_driver(struct spi_driver *sdrv)
{
sdrv->driver.bus = &spi_bus_type;
if (sdrv->probe)
sdrv->driver.probe = spi_drv_probe;
if (sdrv->remove)
sdrv->driver.remove = spi_drv_remove;
if (sdrv->shutdown)
sdrv->driver.shutdown = spi_drv_shutdown;
return driver_register(&sdrv->driver);
}需要注意的是,這裡的spi_driver結構代表的是具體的SPI協議驅動程式。
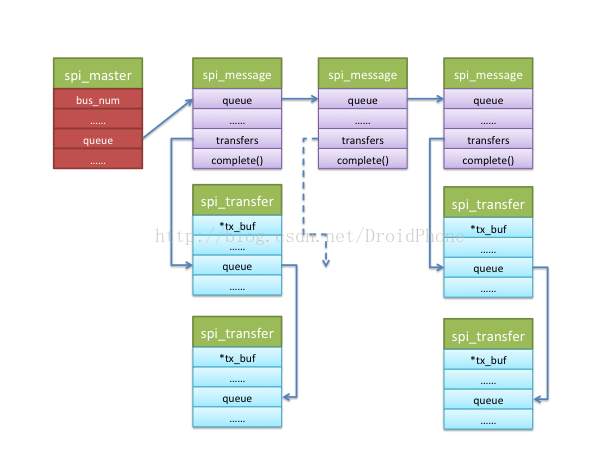
spi_message和spi_transfer結構
要完成和SPI裝置的資料傳輸工作,我們還需要另外兩個資料結構:spi_message和spi_transfer。spi_message包含了一個的spi_transfer結構序列,一旦控制器接收了一個spi_message,其中的spi_transfer應該按順序被髮送,並且不能被其它spi_message打斷,所以我們認為spi_message就是一次SPI資料交換的原子操作。下面我們看看這兩個資料結構的定義:
struct spi_message {
struct list_head transfers;
struct spi_device *spi;
unsigned is_dma_mapped:1;
/* completion is reported through a callback */
void (*complete)(void *context);
void *context;
unsigned frame_length;
unsigned actual_length;
int status;
struct list_head queue;
void *state;
};struct spi_transfer {
const void *tx_buf;
void *rx_buf;
unsigned len;
dma_addr_t tx_dma;
dma_addr_t rx_dma;
unsigned cs_change:1;
u8 tx_nbits;
u8 rx_nbits;
u8 bits_per_word;
u16 delay_usecs;
u32 speed_hz;
struct list_head transfer_list;
};通用介面層為我們提供了一系列用於操作和維護spi_message和spi_transfer的API函式,這裡也列一下。
用於初始化spi_message結構:
- void spi_message_init(struct spi_message *m);
- void spi_message_add_tail(struct spi_transfer *t, struct spi_message *m);
- void spi_transfer_del(struct spi_transfer *t);
- void spi_message_init_with_transfers(struct spi_message *m, struct spi_transfer *xfers, unsigned int num_xfers);
- struct spi_message *spi_message_alloc(unsigned ntrans, gfp_t flags);
- 非同步版本 int spi_async(struct spi_device *spi, struct spi_message *message);
- 同步版本 int spi_sync(struct spi_device *spi, struct spi_message *message);
總結一下,協議驅動傳送資料的流程大致是這樣的:
- 定義一個spi_message結構;
- 用spi_message_init函式初始化spi_message;
- 定義一個或數個spi_transfer結構,初始化併為資料準備緩衝區並賦值給spi_transfer相應的欄位(tx_buf,rx_buf等);
- 通過spi_message_init函式把這些spi_transfer掛在spi_message結構下;
- 如果使用同步方式,呼叫spi_sync(),如果使用非同步方式,呼叫spi_async();
- int spi_write(struct spi_device *spi, const void *buf, size_t len); ---- 同步方式傳送資料。
- int spi_read(struct spi_device *spi, void *buf, size_t len); ---- 同步方式接收資料。
- int spi_sync_transfer(struct spi_device *spi, struct spi_transfer *xfers, unsigned int num_xfers); ---- 同步方式,直接傳送數個spi_transfer,接收和傳送。
- int spi_write_then_read(struct spi_device *spi, const void *txbuf, unsigned n_tx, void *rxbuf, unsigned n_rx); ---- 先寫後讀。
- ssize_t spi_w8r8(struct spi_device *spi, u8 cmd); ---- 寫8位,然後讀8位。
- ssize_t spi_w8r16(struct spi_device *spi, u8 cmd); ---- 寫8位,然後讀16位。