
大話深度信念網路(DBN)
—— 原文釋出於本人的微信公眾號“大資料與人工智慧Lab”(BigdataAILab),歡迎關注。
讓我們把時間撥回到2006年以前,神經網路自20世紀50年代發展起來後,因其良好的非線效能力、泛化能力而備受關注。然而,傳統的神經網路仍存在一些侷限,在上個世紀90年代陷入衰落,主要有以下幾個原因:
1、傳統的神經網路一般都是單隱層,最多兩個隱層,因為一旦神經元個數太多、隱層太多,模型的引數數量迅速增長,模型訓練的時間非常之久;
2、傳統的神經網路,隨著層數的增加,採用隨機梯度下降的話一般很難找到最優解,容易陷入區域性最優解。在反向傳播過程中也容易出現梯度彌散或梯度飽和的情況,導致模型結果不理想;
3、隨著神經網路層數的增加,深度神經網路的模型引數很多,就要求在訓練時需要有很大的標籤資料,因為訓練資料少的時候很難找到最優解,也就是說深度神經網路不具備解決小樣本問題的能力。
由於以上的限制,深度的神經網路一度被認為是無法訓練的,從而使神經網路的發展一度停滯不前。
2006年,“神經網路之父”Geoffrey Hinton祭出神器,一舉解決了深層神經網路的訓練問題,推動了深度學習的快速發展,開創了人工智慧的新局面,使近幾年來科技界湧現出了很多智慧化產品,深深地影響了我們每個人的生活。
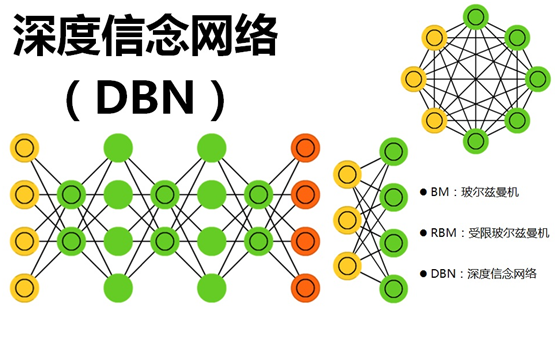
那這個神器是什麼呢?那就是“深度信念網路”(Deep Belief Network,簡稱DBN)。
深度信念網路(DBN)通過採用逐層訓練的方式,解決了深層次神經網路的優化問題,通過逐層訓練為整個網路賦予了較好的初始權值,使得網路只要經過微調就可以達到最優解。而在逐層訓練的時候起到最重要作用的是“受限玻爾茲曼機”(Restricted Boltzmann Machines,簡稱RBM)
下面依次介紹一下什麼是“玻爾茲曼機”(BM)、“受限玻爾茲曼機”(RBM)?
一、玻爾茲曼機(Boltzmann Machines,簡稱BM)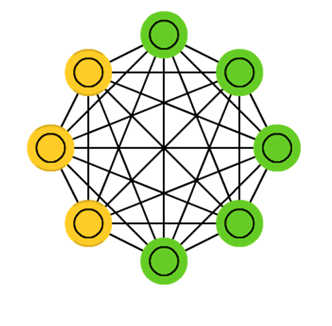
玻爾茲曼機於1986年由大神Hinton提出,是一種根植於統計力學的隨機神經網路,這種網路中神經元只有兩種狀態(未啟用、啟用),用二進位制0、1表示,狀態的取值根據概率統計法則決定。
由於這種概率統計法則的表達形式與著名統計力學家L.E.Boltzmann提出的玻爾茲曼分佈類似,故將這種網路取名為“玻爾茲曼機”。
在物理學上,玻爾茲曼分佈(也稱為吉布斯分佈,Gibbs Distribution)是描述理想氣體在受保守外力的作用(或保守外力的作用不可忽略)時,處於熱平衡態下的氣體分子按能量的分佈規律。
在統計學習中,如果我們將需要學習的模型看成高溫物體,將學習的過程看成一個降溫達到熱平衡的過程(熱平衡在物理學領域通常指溫度在時間或空間上的穩定),最終模型的能量將會收斂為一個分佈,在全域性極小能量上下波動,這個過程稱為“模擬退火”,其名字來自冶金學的專有名詞“退火”,即將材料加熱後再以一定的速度退火冷卻,可以減少晶格中的缺陷,而模型能量收斂到的分佈即為玻爾茲曼分佈。
聽起來很難理解的樣子,只需要記住一個關鍵點:能量收斂到最小後,熱平衡趨於穩定,也就是說,在能量最少的時候,網路最穩定,此時網路最優。
玻爾茲曼機(BM)是由隨機神經元全連線組成的反饋神經網路,且對稱連線,由可見層、隱層組成,BM可以看做是一個無向圖,如下圖所示: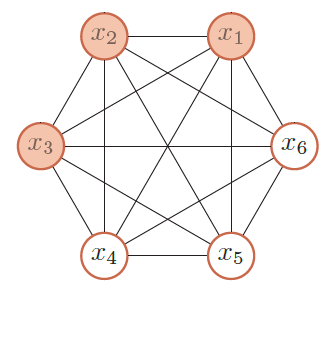
其中,x1、x2、x3為可見層,x4、x5、x6為隱層。
整個能量函式定義為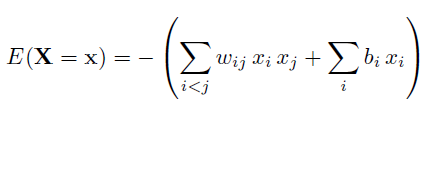
其中,w為權重,b為偏置變數,x只有{0,1}兩種狀態。
根據玻爾茲曼分佈,給出的一個系統在特定狀態能量和系統溫度下的概率分佈,如下:
前面講過,“能量收斂到最小後,熱平衡趨於穩定”,因此:
1、簡單粗暴法
要尋找一個變數使得整個網路的能量最小,一個簡單(但是低效)的做法是選擇一個變數,在其它變數保持不變的情況下,將這個變數設為會導致整個網路能量更低的狀態。那麼一個變數Xi的兩個狀態0(關閉)和1(開啟)之間的能量差異為: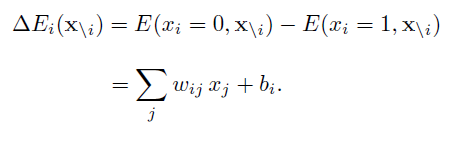
這時,如果能量差異ΔE大於一定的閾值(比如0),我們就設Xi = 1(也即取能量小的),否則就設Xi = 0。這種簡單的方法通過反覆不斷執行,在一定時間之後收斂到一個解(可能是區域性最優解)。
2、最大似然法
利用“模擬退火”原理尋找全域性最優解,根據玻爾茲曼分佈,Xi=1的概率為: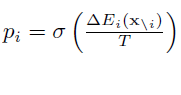
訓練集v的對數似然函式為: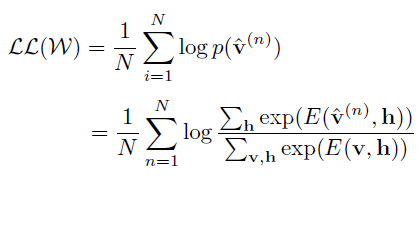
對每個訓練向量p(v)的對數似然對引數w求導數,得到梯度:
跟傳統的神經網路類似,引數w的更新公式如下(a為學習率):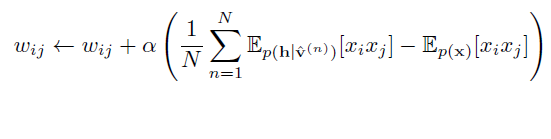
好了好了,公式就講到這裡了,看上去挺複雜的,沒錯,確實計算很複雜,這個梯度很難精確計算,整個計算過程會十分地耗時。
目前,可以通過一些取樣方法(例如Gibbs取樣)來進行近似求解。
玻爾茲曼機(BM)可以用在監督學習和無監督學習中。在監督學習中,可見變數又可以分為輸入和輸出變數,隱變數則隱式地描述了可見變數之間複雜的約束關係。在無監督學習中,隱變數可以看做是可見變數的內部特徵表示,能夠學習資料中複雜的規則。玻爾茲曼機代價是訓練時間很長很長很長。
二、受限玻爾茲曼機(Restricted Boltzmann Machines,簡稱RBM)
所謂“受限玻爾茲曼機”(RBM)就是對“玻爾茲曼機”(BM)進行簡化,使玻爾茲曼機更容易更加簡單使用,原本玻爾茲曼機的可見元和隱元之間是全連線的,而且隱元和隱元之間也是全連線的,這樣就增加了計算量和計算難度。
“受限玻爾茲曼機”(RBM)同樣具有一個可見層,一個隱層,但層內無連線,層與層之間全連線,節點變數仍然取值為0或1,是一個二分圖。也就是將“玻爾茲曼機”(BM)的層內連線去掉,對連線進行限制,就變成了“受限玻爾茲曼機”(RBM),這樣就使得計算量大大減小,使用起來也就方便了很多。如上圖。
“受限玻爾茲曼機”(RBM)的特點是:在給定可見層單元狀態(輸入資料)時,各隱層單元的啟用條件是獨立的(層內無連線),同樣,在給定隱層單元狀態時,可見層單元的啟用條件也是獨立的。
跟“玻爾茲曼機”(BM)類似,根據玻爾茲曼分佈,可見層(變數為v,偏置量為a)、隱層(變數為h,偏置量為b)的概率為: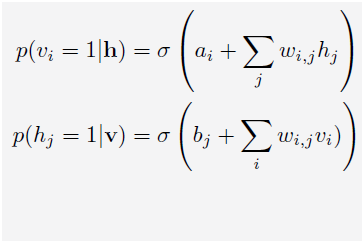
訓練樣本的對數似然函式為: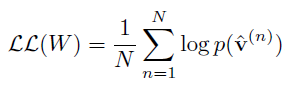
求導數:
總之,還是挺複雜的,計算也還是挺花時間的。
同樣,可以通過Gibbs 取樣的方法來近似計算。雖然比一般的玻爾茲曼機速度有很大提高,但一般還是需要通過很多步取樣才可以採集到符合真實分佈的樣本。這就使得受限玻爾茲曼機的訓練效率仍然不高。
2002年,大神Hinton再出手,提出了“對比散度”(Contrastive Divergence,簡稱CD)演算法,這是一種比Gibbs取樣更加有效的學習演算法,促使大家對RBM的關注和研究。
RBM的本質是非監督學習的利器,可以用於降維(隱層設定少一點)、學習提取特徵(隱層輸出就是特徵)、自編碼器(AutoEncoder)以及深度信念網路(多個RBM堆疊而成)等等。
三、深度信念網路(Deep Belief Network,簡稱DBN)
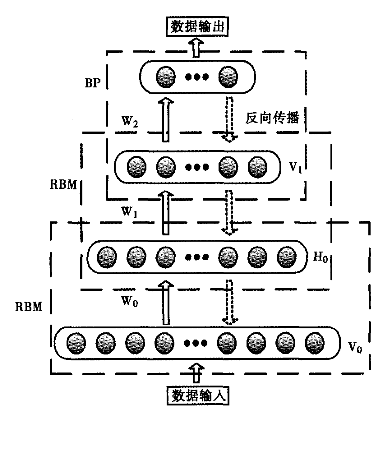
2006年,Hinton大神又又又出手了,提出了“深度信念網路”(DBN),並給出了該模型一個高效的學習演算法,這也成了深度學習演算法的主要框架,在該演算法中,一個DBN模型由若干個RBM堆疊而成,訓練過程由低到高逐層進行訓練,如下圖所示: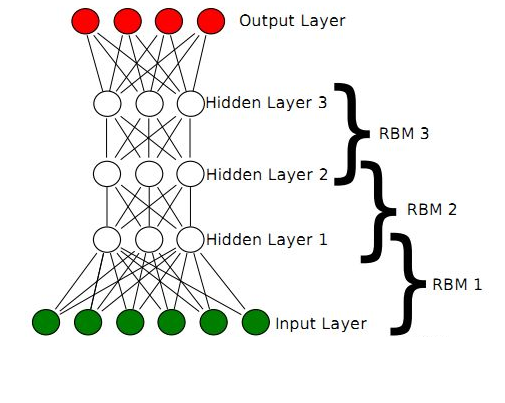
回想一下RBM,由可見層、隱層組成,顯元用於接受輸入,隱元用於提取特徵,因此隱元也有個別名,叫特徵檢測器。也就是說,通過RBM訓練之後,可以得到輸入資料的特徵。(感性對比:聯想一下主成分分析,提取特徵)
另外,RBM還通過學習將資料表示成概率模型,一旦模型通過無監督學習被訓練或收斂到一個穩定的狀態,它還可以被用於生成新資料。(感性對比:聯想一下曲線擬合,得出函式,可用於生成資料)
正是由於RBM的以上特點,使得DBN逐層進行訓練變得有效,通過隱層提取特徵使後面層次的訓練資料更加有代表性,通過可生成新資料能解決樣本量不足的問題。逐層的訓練過程如下:
(1)最底部RBM以原始輸入資料進行訓練
(2)將底部RBM抽取的特徵作為頂部RBM的輸入繼續訓練
(3)重複這個過程訓練以儘可能多的RBM層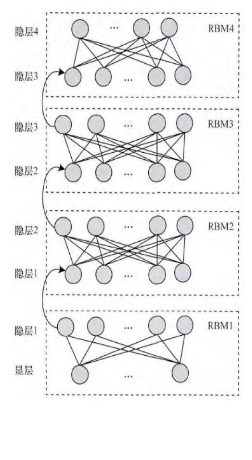
由於RBM可通過CD快速訓練,於是這個框架繞過直接從整體上對DBN高度複雜的訓練,而是將DBN的訓練簡化為對多個RBM的訓練,從而簡化問題。而且通過這種方式訓練後,可以再通過傳統的全域性學習演算法(如BP演算法)對網路進行微調,從而使模型收斂到區域性最優點,通過這種方式可高效訓練出一個深層網路出來,如下圖所示:
Hinton提出,這種預訓練過程是一種無監督的逐層預訓練的通用技術,也就是說,不是隻有RBM可以堆疊成一個深度網路,其它型別的網路也可以使用相同的方法來生成網路。
牆裂建議
Hinton 大神寫了一篇關於受限玻爾茲曼機的訓練實用指南(《A Practical Guide to Training Restricted Boltzmann Machines》),非常詳細地描述訓練過程,建議仔細閱讀下這篇論文,肯定大有收穫。
掃描以下二維碼關注本人公眾號“大資料與人工智慧Lab”(BigdataAILab),然後回覆“論文”關鍵字可線上閱讀這兩篇經典論文的內容。
推薦相關閱讀