
目標檢測(一)目標檢測評價指標
召回率(Recall),精確率(Precision),平均正確率(AP),交除並(IoU)
摘要
在訓練YOLO v2的過程中,系統會顯示出一些評價訓練效果的值,如Recall,IoU等等。為了怕以後忘了,現在把自己對這幾種度量方式的理解記錄一下。
這一文章首先假設一個測試集,然後圍繞這一測試集來介紹這幾種度量方式的計算方法。
大雁與飛機
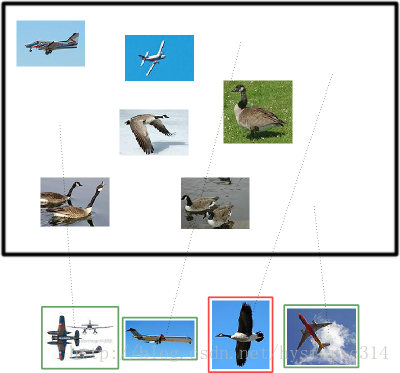
假設現在有這樣一個測試集,測試集中的圖片只由大雁和飛機兩種圖片組成,如下圖所示:

假設你的分類系統最終的目的是:能取出測試集中所有飛機的圖片,而不是大雁的圖片。
現在做如下的定義:
True positives : 飛機的圖片被正確的識別成了飛機。
True negatives:
False positives: 大雁的圖片被錯誤地識別成了飛機。
False negatives: 飛機的圖片沒有被識別出來,系統錯誤地認為它們是大雁。
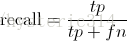
假設你的分類系統使用了上述假設識別出了四個結果,如下圖所示:
那麼在識別出的這四張照片中:
True positives : 有三個,畫綠色框的飛機。
False positives: 有一個,畫紅色框的大雁。
沒被識別出來的六張圖片中:
True negatives : 有四個,這四個大雁的圖片,系統正確地沒有把它們識別成飛機。
False negatives: 有兩個,兩個飛機沒有被識別出來,系統錯誤地認為它們是大雁。
Precision 與 Recall
Precision其實就是在識別出來的圖片中,True positives所佔的比率:
其中的n代表的是(True positives + False positives),也就是系統一共識別出來多少照片 。
在這一例子中,True positives為3,False positives為1,所以Precision值是 3/(3+1)=0.75。
意味著在識別出的結果中,飛機的圖片佔75%。
Recall 是被正確識別出來的飛機個數與測試集中所有飛機的個數的比值:
Recall的分母是(True positives + False negatives),這兩個值的和,可以理解為一共有多少張飛機的照片。
在這一例子中,True positives為3,False negatives為2,那麼Recall值是 3/(3+2)=0.6。
意味著在所有的飛機圖片中,60%的飛機被正確的識別成飛機.。
調整閾值
你也可以通過調整閾值,來選擇讓系統識別出多少圖片,進而改變Precision 或 Recall 的值。
在某種閾值的前提下(藍色虛線),系統識別出了四張圖片,如下圖中所示:
分類系統認為大於閾值(藍色虛線之上)的四個圖片更像飛機。
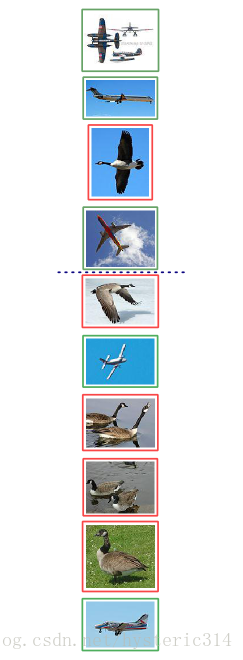
我們可以通過改變閾值(也可以看作上下移動藍色的虛線),來選擇讓系統識別能出多少個圖片,當然閾值的變化會導致Precision與Recall值發生變化。比如,把藍色虛線放到第一張圖片下面,也就是說讓系統只識別出最上面的那張飛機圖片,那麼Precision的值就是100%,而Recall的值則是20%。如果把藍色虛線放到第二張圖片下面,也就是說讓系統只識別出最上面的前兩張圖片,那麼Precision的值還是100%,而Recall的值則增長到是40%。
下圖為不同閾值條件下,Precision與Recall的變化情況:
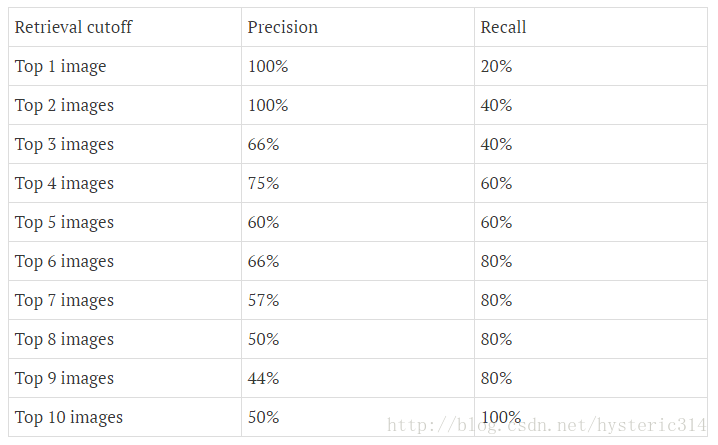
Precision-recall 曲線
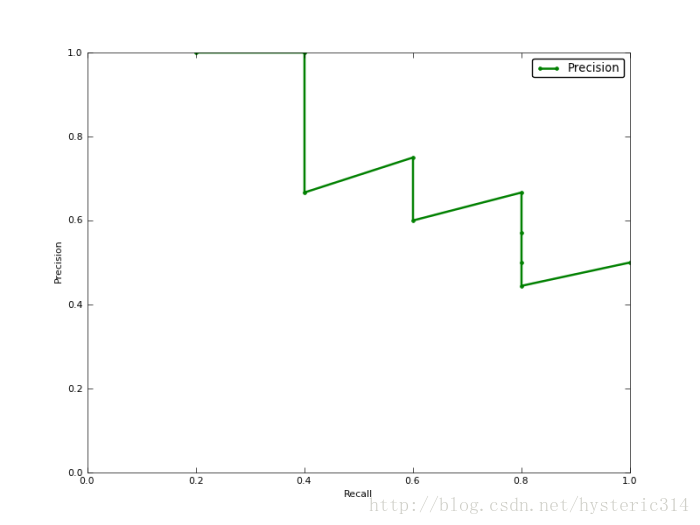
如果你想評估一個分類器的效能,一個比較好的方法就是:觀察當閾值變化時,Precision與Recall值的變化情況。如果一個分類器的效能比較好,那麼它應該有如下的表現:被識別出的圖片中飛機所佔的比重比較大,並且在識別出大雁之前,儘可能多地正確識別出飛機,也就是讓Recall值增長的同時保持Precision的值在一個很高的水平。而效能比較差的分類器可能會損失很多Precision值才能換來Recall值的提高。通常情況下,文章中都會使用Precision-recall曲線,來顯示出分類器在Precision與Recall之間的權衡。
上圖就是分類器的Precision-recall 曲線,在不損失精度的條件下它能達到40%Recall。而當Recall達到100%時,Precision 降低到50%。
Approximated Average precision
相比較與曲線圖,在某些時候還是一個具體的數值能更直觀地表現出分類器的效能。通常情況下都是用 Average Precision來作為這一度量標準,它的公式為:
在這一積分中,其中p代表Precision ,r代表Recall,p是一個以r為引數的函式,That is equal to taking the area under the curve.

實際上這一積分極其接近於這一數值:對每一種閾值分別求(Precision值)乘以(Recall值的變化情況),再把所有閾值下求得的乘積值進行累加。公式如下:
在這一公式中,N代表測試集中所有圖片的個數,P(k)表示在能識別出k個圖片的時候Precision的值,而 Delta r(k) 則表示識別圖片個數從k-1變化到k時(通過調整閾值)Recall值的變化情況。
在這一例子中,Approximated Average Precision的值
=(1 * (0.2-0)) + (1 * (0.4-0.2)) + (0.66 * (0.4-0.4)) + (0.75 * (0.6-0.4)) + (0.6 * (0.6-0.6)) + (0.66 * (0.8-0.6)) + (0.57 * (0.8-0.8)) + (0.5 * (0.8-0.8)) + (0.44 * (0.8-0.8)) + (0.5 * (1-0.8)) = 0.782.
=(1 * 0.2) + (1 * 0.2) + (0.66 * 0) + (0.75 * 0.2) + (0.6 *0) + (0.66 * 0.2) + (0.57 *0) + (0.5 *0) + (0.44 *0) + (0.5 * 0.2) = 0.782.
通過計算可以看到,那些Recall值沒有變化的地方(紅色數值),對增加Average Precision值沒有貢獻。
Interpolated average precision
不同於Approximated Average Precision,一些作者選擇另一種度量效能的標準:Interpolated Average Precision。這一新的演算法不再使用P(k),也就是說,不再使用當系統識別出k個圖片的時候Precision的值與Recall變化值相乘。而是使用:
也就是每次使用在所有閾值的Precision中,最大值的那個Precision值與Recall的變化值相乘。公式如下:


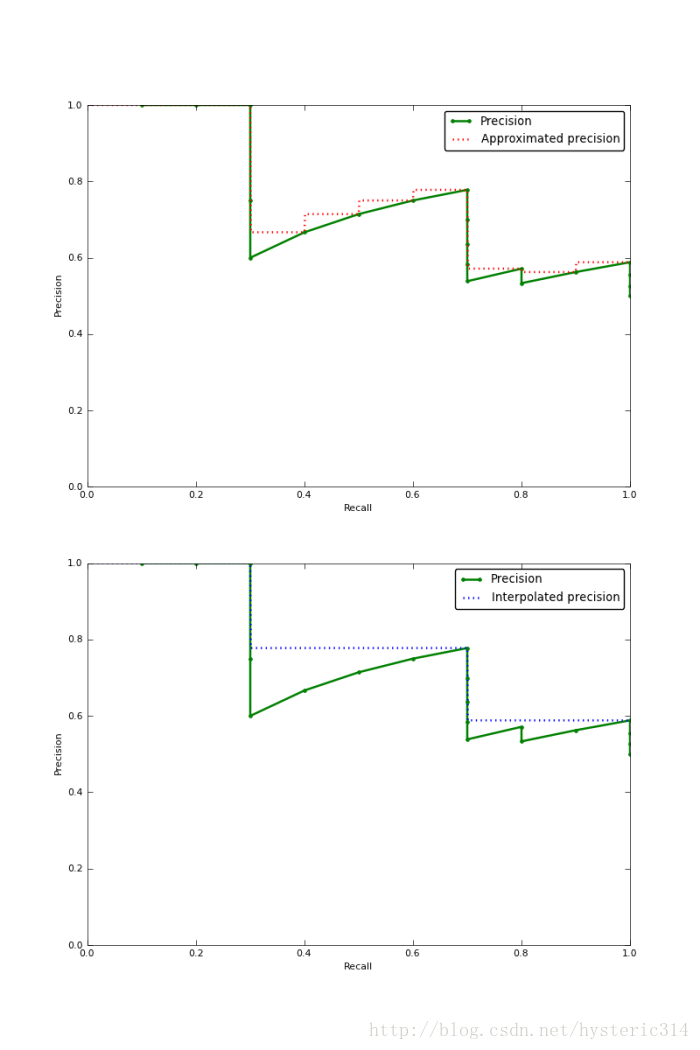
下圖的圖片是Approximated Average Precision 與 Interpolated Average Precision相比較。
需要注意的是,為了讓特徵更明顯,圖片中使用的引數與上面所說的例子無關。
很明顯 Approximated Average Precision與精度曲線挨的很近,而使用Interpolated Average Precision算出的Average Precision值明顯要比Approximated Average Precision的方法算出的要高。
一些很重要的文章都是用Interpolated Average Precision 作為度量方法,並且直接稱算出的值為Average Precision 。PASCAL Visual Objects Challenge從2007年開始就是用這一度量制度,他們認為這一方法能有效地減少Precision-recall 曲線中的抖動。所以在比較文章中Average Precision 值的時候,最好先弄清楚它們使用的是那種度量方式。
IoU
IoU這一值,可以理解為系統預測出來的框與原來圖片中標記的框的重合程度。
計算方法即檢測結果Detection Result與 Ground Truth 的交集比上它們的並集,即為檢測的準確率:
如下圖所示:
藍色的框是:GroundTruth
黃色的框是:DetectionResult
綠色的框是:DetectionResult ⋂GroundTruth
紅色的框是:DetectionResult ⋃GroundTruth
