
ROS-SLAM-自主導航
前言:無。
一、啟動模擬環境
cd ~/catkin_ws/src/robot_mrobot/mrobot_gazebo/launch
roslaunch mrobot_laser_nav_gazebo.launch
二、啟動slam導航
cd ~/catkin_ws/src/robot_mrobot/mrobot_navigation/launch
roslaunch exploring_slam_demo.launch
三、手動探索
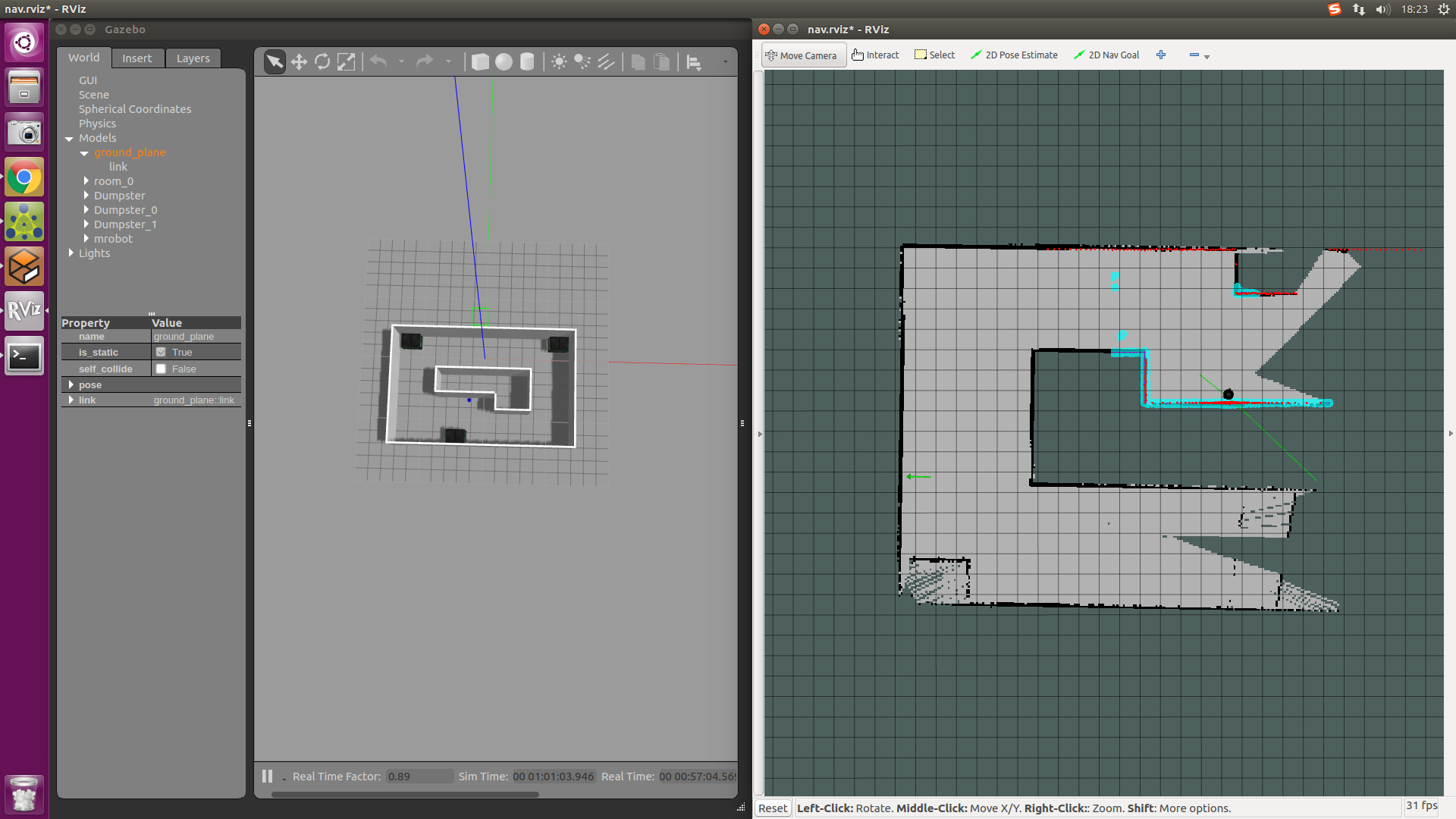
使用rviz的“2D nav goal”手動選擇目的地,機器人開始導航,同時使用mapping演算法實時構建地圖。
效果如下;

如果多次嘗試無果,機器人最終會放棄,終端裡將看到錯誤提示。
四、自動slam導航
rosrun mrobot_navigation random_navigation.py
----------------------------------
顯示如下:
-END-
相關推薦
ROS-SLAM-自主導航
前言:無。 一、啟動模擬環境 cd ~/catkin_ws/src/robot_mrobot/mrobot_gazebo/launch roslaunch mrobot_laser_nav_gazebo.launch 二、啟動slam導航 cd ~/catkin_ws/src/rob
基於STM32的ROS智慧移動機器人構建地圖、定位以及自主導航研究
原文地址是:https://blog.csdn.net/huapiaoxiang21/article/details/81504395 好長時間沒寫部落格了,今天繼續工作的第一件事情是做一款STM32 的ROS智慧移動機器人,構建地圖以及自主導航。在這裡筆者認為最難的事情是搞機器人底盤,由於
拿ROS navigation 玩自主導航攻略(1)——by 西工大一小學生
http://blog.exbot.net/archives/1129 這個攻略是為一些有自己的硬體平臺,想快速上手ROS navigaion的同學(老師 etc。。)準備的,並且假設大家已經對ROS的基本概念(程序間通訊topic service 資料型別 msg)
路徑規劃A*演算法及SLAM自主地圖建立導航演算法
最近研究機器人自主路徑規劃,關注了「泡泡機器人SLAM」專欄平臺,上面有很多公開的視訊,涵蓋多種SLAM技術及其演算法的視訊、PPT和程式碼資源,屬於公開,轉載請註明。第一期1.工業相機選型及介紹-劉富強:2.深度學習-顏沁睿:3.SVO & LSD_SLAM解析 -
ROS——SLAM實時更新顯示柵格地圖之nav_msgs::GridCells
文章目錄 GridCells概述 OccupancyGrid使用注意事項 建立工程 在Rviz中實時現實柵格地圖 結束語 GridCells概述 GridCells是另外一種建立柵格地圖的方法,與nav_msgs:
ROS——SLAM實時更新顯示柵格地圖之nav_msgs::OccupancyGrid
文章目錄 效果圖 OccupancyGrid概述 OccupancyGrid使用注意事項 建立工程 在Rviz中實時現實柵格地圖 結束語 效果圖 廢話不說,直接上最終效果圖~看完圖你應該就知道是不是你想要的東
ROS——SLAM與Navigation
第九章 SLAM 本章簡介 機器人研究的問題包含許許多多的領域,我們常見的幾個研究的問題包括:建圖(Mapping)、定位(Localization)和路徑規劃(Path Planning),如果機器人帶有機械臂,那麼運動規劃(Motion Planning)也是重要的一個環節。而同步定位與
turtlebot2自主導航move_base_grid除錯記錄
1.terminal1,執行 roscore 2.turminal2 執行turtlebot節點 roslaunch turtlebot_bringup minimal.launch 3.terminal3啟動其他一系列節點 roslaunch rbx1_nav
ORB-SLAM2:基於可識別特徵的自主導航與地圖構建
ORB-SLAM2 :基於可識別特徵的自主導航與地圖構建 ORB-SLAM: Tracking and Mapping Recognizable Features 翻譯:2016年2月24日 Taylor Guo 寫在前面的話:由於上個月開始翻譯的時候,沒有校譯,部分關鍵詞翻譯可能不是很恰當,先
ROS+SLAM學習日誌(4)獲取控制與位移資訊
在ROS的rostopic list中有兩個主題是有關控制資訊的,一個是/cmd_vel ,另一個是 /server/Odom 這兩個有什麼,這兩個topic記錄下來的bag都有linear與orientation這兩個列表,前者中的x表示速度,後者的z表示方向
ROS+SLAM筆記(5)建立包
1 先建立工作空間 $ mkdir –p ~/dev/catkin_ws/src $ cd ~/dev/catkin_ws/src $ catkin_init_workspace 2 編譯工作空間 $ cd ~/dev/catkin_ws $ ca
ROS slam gmapping不能畫地圖
最後啟動KobukiRos物件的update()函式,用於檢測底盤的各種狀態,比如底盤的連線狀態,電池狀態,輪子是否接觸地面等等。 Turtlebot的執行機制總結如下: 啟動minimal.launch之後,啟動Kobuki_nodelet節點,新建兩個類物件,一是用於底盤和ROS通
turtlebot實現在多個目標點之間自主導航
turtlebot實現在幾個目標點之間自主導航的任務,關鍵是指定turtlebot的初始位姿後,設定多個目標點。 在~/catkin_ws/src/simple_navigation_gola/src目錄下建立nav_test.py檔案。 實現程式如下: #!/usr/bi
ROS+SLAM學習日誌(3)獲取影象與視訊
在ROS中,一般會有一個節點用於展示攝像頭採集到的影象。這是一個包含複雜資料的topic,一般最好用特殊的工具來顯示與分析。因為這裡根據攝像頭裝置的不同需要不同的launch檔案來啟動攝像頭,我這裡用的是自己機器人的檔案,或者也可以用網上的例程用自己筆記本攝像頭
北理宋文傑:時空域下智慧車輛未知區域自主導航技術
不到現場,照樣看最乾貨的學術報告! 嗨,大家好。這裡是學術報告專欄,讀芯術小編不定期挑選並親自跑會,為大家奉獻科技領域最優秀的學
基於影象語義的視覺化同時定位和建圖的面向應用程式的移動機器人自主導航解決方案綜述
# 基於影象語義的視覺化同時定位和建圖的面向應用程式的移動機器人自主導航解決方案綜述 論文名稱: A survey of image semantics-based visual simultaneous localization and mapping Application-oriented solut
ROS--導航、路徑規劃和SLAM
nbsp del 正方 with ros let slam 規劃 節點 一、用move_base導航走正方形 1、 roscore 2、執行 roslaunch rbx1_bringup fake_turtlebot.launch 然後 rosla
【模擬】Ros by example1 控制底座、導航、路徑規劃、SLAM程式碼註釋
一、控制底座 效果:讓機器人花一段時間向前移動1m,再旋轉180度,最後返回原點。 1、基於定時的timed_out_and_back.py # -*- coding: utf-8 -*- 有中文註釋 #!/usr/bin/env python import rospy from
【模擬】Ros by example1 控制底座、導航、路徑規劃、SLAM
為了快速瀏覽教程,先從ArbotiX虛擬器開始。具體程式碼看ros-by-example 1,主要講述實現過程。 首先要啟動一個虛擬的Turtlebot $ roslaunch rbx1_bringup fake_turtlebot.launch 另一個終端,開啟RViz視覺化機器人運動
SLAM≠機器人自主定位導航
SLAM技術作為機器人自主移動的關鍵技術,讓很多人都誤解為:SLAM=機器人自主定位導航。 其實,SLAM≠機器人自主定位導航 ,不解決行動問題。 SLAM如其名一樣,主要解決的是機器人的地圖構建和即時定位問題,而自主導航