(一)神經網路初探-感知機
阿新 • • 發佈:2019-01-28
引言
博主希望通過最通俗的語言理解感知機,裡面大白話可能比較多,適合剛剛接觸感知機的學習者。大牛請繞路
感知機
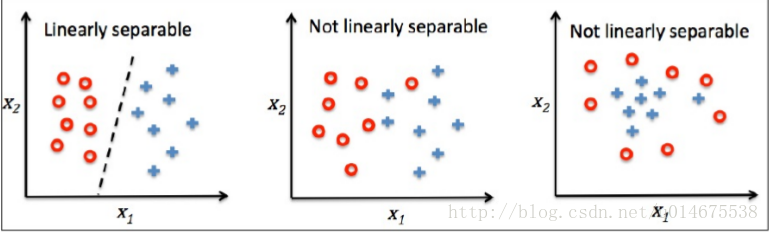
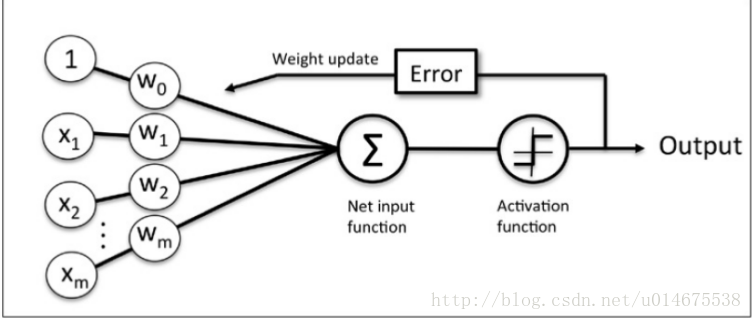
感知機是由兩層神經元組成,其中一層為輸入層,另外一層為輸出層。輸入層用來接收外界的輸入訊號,而輸出層用來將結果輸出。感知機一般用來進行二元資料的分類。感知機的思想主要是通過找到一個超平面,使用這個超平面將資料進行分開。
感知機詳解

例如有一個數據集T={
其中,
那我們怎樣將其歸為哪一個類奧,因此就需要設定閾值,當輸出的函式值y大於設定的閾值,則歸為+1類,否則歸為-1類。在這裡我們使用一個啟用函式,將輸出的y輸入啟用函式,啟用函式就輸出1或者-1.啟用函式到底是什麼呢,我們看下圖,一般使用階躍函式或者是sigmoid函式。


上面的這幅圖就是階躍函式,下面這個就是sigmoid函式,由於階躍函式不連續,因此求導不方便,因此在實際使用過程中基本上都是sigmoid函式。
因為我們現在找到的這條直線可能不是最優的,這句話什麼意思呢,就是對於有些樣本是錯分類的,這裡就不用圖表示,接下來就需要根據輸出結果來調整權重w了。
其中
通過輸出就完成了權重的調整。
感知機實驗部分
接下來我們使用python動手練習一下
import numpy as np
class Perceptron(object):
def __init__(self,eta = 0.1,n_iter = 10):
self.eta = eta
self.n_iter = n_iter
def fit(self,X,y):
self.w_ = np.zeros(1+X.shape[1 上面的這一段為演算法的核心程式碼
import pandas as pd
from perceptron.Perceptron import *
from perceptron.plot_decision_region import *
df = pd.read_csv("http://archive.ics.uci.edu/ml/machine-learning-databases/iris/iris.data",header = None)
y = df.iloc[0:100,4].values
y = np.where(y=='Iris-setosa',-1,1)
X = df.iloc[0:100,[0,2]].values
plt.scatter(X[:50,0],X[:50,1],color = 'red',marker='o',label = 'setosa')
plt.scatter(X[50:100,0],X[50:100,1],color = 'blue',marker='x',label = 'versicolor')
plt.xlabel('petal length')
plt.ylabel('sepal length')
plt.legend(loc = 'upper left')
plt.show()
ppn = Perceptron(eta=0.1,n_iter = 10)
ppn.fit(X,y)
plt.plot(range(1,len(ppn.errors)+1),ppn.errors,marker = 'o')
plt.xlabel('iter')
plt.ylabel('mistakes class')
plt.show()
plot_decision_region(X,y,classifier = ppn)
plt.xlabel('sepal length[cm]')
plt.ylabel('petal length[cm]')
plt.legend(loc = 'upper left')
plt.show()from matplotlib.colors import ListedColormap
import numpy as np
import matplotlib.pyplot as plt
def plot_decision_region(X,y,classifier,resolution = 0.02):
markers = ('s','x','o','^','v')
colors = ('red','blue','lightgreen','gray','cyan')
cmap = ListedColormap(colors[:len(np.unique(y))])
x1_min,x1_max = X[:,0].min()-1,X[:,0].max()+1
x2_min,x2_max = X[:,1].min()-1,X[:,1].max()+1
xx1,xx2 = np.meshgrid(np.arange(x1_min,x1_max,resolution),
np.arange(x2_min,x2_max,resolution))
Z = classifier.predict(np.array([xx1.ravel(),xx2.ravel()]).T)
Z = Z.reshape(xx1.shape)
plt.contourf(xx1,xx2,Z,alpha = 0.4,cmap = cmap)
plt.xlim(xx1.min(),xx1.max())
plt.ylim(xx2.min(),xx2.max())
for idx,cl in enumerate(np.unique(y)):
plt.scatter(x = X[y==cl,0],y = X[y==cl,1],
alpha=0.8,c = cmap(idx),
marker=markers[idx],label = cl)
總結
感知機對於先行可分的資料集可以適用,對於那些線性不可分的資料無法工作。第2張圖片和第3張就是線性不可分的資料集。對於這些資料的處理,後面會講解處理辦法。