
目標檢測中Loss函式:Focal Loss反向求導


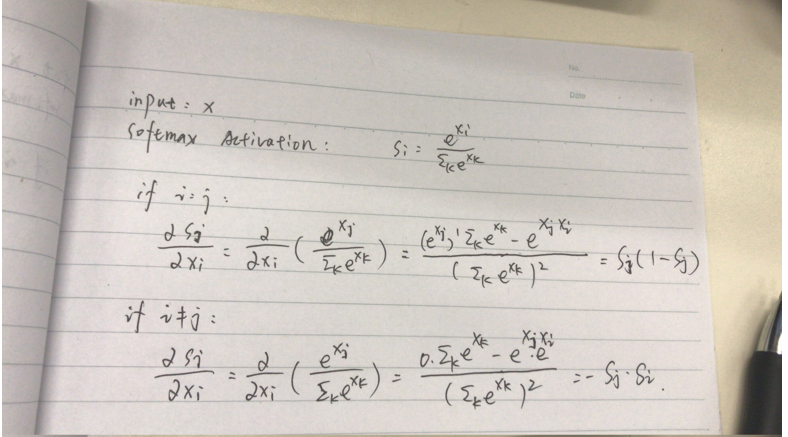
其中的分母的平方是整體的平方,先來看看softmax是如何求導的:
相關推薦
目標檢測中Loss函式:Focal Loss反向求導
focal Loss梯度求導的鏈式法則:轉載: https://blog.csdn.net/linmingan/article/details/77885832 反向傳播網路的工作過程是首先進行資訊的前饋,計算出各個節點的輸入輸出值,網路最終的輸出,並把各個節點的輸入
【論文閱讀筆記】目標檢測之RetinaNet--論文閱讀 Focal Loss for Dense Object Detection
【寫在前面】 RetinaNet 是目前目標檢測最為優秀的方法之一,值得好好拜讀一下,在COCO資料集上達到了單個模型的state of art 的效果, 由Kaiming He團隊所作,作者發現導致one-stage演算法效能劣於two-stage演算法的主要
目標檢測:Focal Loss論文詳解
轉載:http://blog.csdn.net/qq_34564947/article/details/77200104Focal Loss for Dense Object Detection引入問題目前目標檢測的框架一般分為兩種:基於候選區域的two-stage的檢測框架
PIoU Loss:傾斜目標檢測專用損失函式,公開超難傾斜目標資料集Retail50K | ECCV 2020 Spotlight
> 論文提出從IoU指標延伸來的PIoU損失函式,能夠有效地提高傾斜目標檢測場景下的旋轉角度預測和IoU效果,對anchor-based方法和anchor-free方法均適用。另外論文提供了Retail50K資料集,能夠很好地用於評估傾斜目標檢測演算法的效能 來源:曉飛的演算法工程筆記 公
深度學習【17】物體檢測:Focal Loss 反向求導及darknet上的實現
Focal Loss 反向求導及darknet上的實現 Focal Loss 可以解決不平衡分類問題,是在交叉熵損失函式上的擴充套件。詳見,論文:Focal Loss for Dense Object Detection。 該文,主要推導FL在softmax
tensorflow利用預訓練模型進行目標檢測(四):檢測中的精度問題以及evaluation
一、tensorflow提供的evaluation Inference and evaluation on the Open Images dataset:https://github.com/tensorflow/models/blob/master/research/object_detection/g
caffe新增層:Focal Loss的caffe實現
1,caffe.proto 原始檔在src/caffe/proto/目錄裡 從492行這些optional裡,作者添加了兩行: optional ReLU6Parameter relu6_param = 208; optional FocalLossParamete
損失函式:Hinge Loss(max margin)
Hinge Loss簡介 Hinge Loss是一種目標函式(或者說損失函式)的名稱,有的時候又叫做max-margin objective。其最著名的應用是作為SVM的目標函式。 其二分類情況下,公式如下: l(y)=max(0,1−t⋅y) 其中,y是預測值(-1到1之間),t為目標值(±1)。
[論文閱讀]:Focal Loss for dense Object Detection
在2D的影象檢測的任務中,一種有一個比較明顯的問題就是前後景數量上巨大的不平衡,背景一般遠遠多餘前景(也就是目標),這就導致一個問題,就是背景相關的梯度幾乎統治了梯度的傳播過程,本文提出的Focal Loss 就是試圖對損失函式的形態進行更改,從而達到平衡前後景
目標檢測 1 : 目標檢測中的Anchor詳解
鹹魚了半年,年底了,把這半年做的關於目標的檢測的內容總結下。 本文主要有兩部分: 目標檢測中的邊框表示 Anchor相關的問題,R-CNN,SSD,YOLO 中的anchor 目標檢測中的邊框表示 目標檢測中,使用一個矩形的邊框來表示。在影象中,可以基於影象座標系使用多種方式來表示矩形框。 最直接的方式
tensorflow利用預訓練模型進行目標檢測(一):預訓練模型的使用
err sync numpy sna sta porting trac git int32 一、運行樣例 官網鏈接:https://github.com/tensorflow/models/blob/master/research/object_detection/obje
目標檢測中對端對端(End to end)的理解
End to end:指的是輸入原始資料,輸出的是最後結果,應用在特徵學習融入演算法,無需單獨處理。 end-to-end(端對端)的方法,一端輸入我的原始資料,一端輸出我想得到的結果。只關心輸入和輸出,中間的步驟全部都不管。 端到端指的是輸入是原始資料,輸出是最後的結果,原來輸入端不是
為什麼目標檢測中要將全連線層轉化為卷積層?
參考文章: VGG網路中測試時為什麼全連結層改成卷積層 為什麼使用卷積層替代CNN末尾的全連線層 首先看一下卷積層的特點: 區域性連線:提取資料區域性特徵,比如卷積核的感受野 權值共享:一個卷積核只需提取一個特徵,降低了網路訓練的難度 究竟使用卷積層代替全連線層會帶來什麼好處呢?
tensorflow利用預訓練模型進行目標檢測(二):將檢測結果存入mysql資料庫
mysql版本:5.7 ; 資料庫:rdshare;表captain_america3_sd用來記錄某幀是否被檢測。表captain_america3_d用來記錄檢測到的資料。 python模組,包部分內容參考http://www.runoob.com/python/python-modules.html&
目標檢測中tensorflow常用API以及備選框篩選程式碼分析
目標檢測演算法中,因為產生的備選框特別多,需要刪減。而刪減的方法是NMS(非極大抑制演算法)。網上很多演算法是自己編寫功能程式碼。但是這不是tensorflow中自帶的功能,所以在使用tensorflow恢復模型的時候,sess並不能hold住他們。因此別人需要
基於深度神經網路的目標檢測系列文章一:摘要
注:本文源自本人的碩士畢業論文,未經許可,嚴禁轉載! 原文請參考知網:知網本論文下載地址 摘 要 隨著計算機效能的飛速提升,蟄伏已久的深度學習演算法終於迎來了高速發展的時期。物體識別(也叫物體檢測,目標檢測)是計算機視覺領域中最有價值的研究方向之一。本論文主要
基於深度神經網路的目標檢測系列文章二:緒論
注:本文源自本人的碩士畢業論文,未經許可,嚴禁轉載! 原文請參考知網:知網本論文下載地址 第一章 緒論 1.1 研究背景與意義 當人類首次發明計算機時,就已經開始思考如何讓計算機變得智慧。如今,人工智慧(artificial intelligence)已經成為一
目標檢測中的AP和mAP
作者:Wentao 連結:https://www.zhihu.com/question/53405779/answer/419532990 來源:知乎 著作權歸作者所有。商業轉載請聯絡作者獲得授權,非商業轉載請註明出處。 mAP定義及相關概念 mAP: mean Aver
目標檢測中常見程式程式碼片段總結
在學習目標檢測的過程中,除了看大神的原作之外,還要學習大神的原始碼,通過原作和原始碼才能更好的學習大神的思想。作為一個新手,在閱讀原始碼的過程是一個倍感煎熬的過程,如果大神的程式碼註釋比較少的話,有的時候為了理解某一個程式碼片段,可能需要花上幾天的時間來理解,這是一個很費時的
【python】小目標檢測中對一幅高解析度圖分塊且改變目標bounding box的座標
很多時候,在小目標檢測中,對於一副高解析度影象,我們很難直接輸入一整幅大圖來進行目標檢測,特別是對於one-stage的方法,如SSD的輸入尺寸是300和512, YOLO的輸入尺寸是416,而高解析度影象通常有幾千×幾千畫素。所以我在此分享將一副高解析度影象分塊同時寫入對應目標的bound