
圓形目標中心點在tof相機座標系下的三維座標的計算(1)
阿新 • • 發佈:2019-02-07
將tof相機得到的深度影象轉換為灰度影象,然後對灰度影象進行雙邊濾波,去除噪聲的同時使邊緣得到較好的保持,然後對濾波後的灰度影象進行hough圓變換,得到圓心在影象中的畫素座標,然後利用tof相機的點雲資料,求得圓心在tof相機座標系下的三維座標。
程式如下:
#include "opencv2/core/core.hpp"
#include "opencv2/highgui/highgui.hpp"
#include "opencv2/imgproc/imgproc.hpp"
#include "opencv2/features2d/features2d.hpp" //需要新增該標頭檔案 
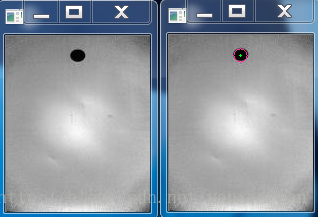
此方法計算出的圓心在相機下三維座標與其實際值存在一定的誤差,因圓形目標中心與相機中心在X軸或Y軸方向偏離較大時,圓形目標在相機場景下呈現橢圓狀態,後續對此進行了改進。