
動態規劃之最小帶權路徑(Min Cost Path)
已知一個成本矩陣cost[][],位置(m, n)的權重是cost[][],寫一個函式,這個函式返回從(0, 0)到(m, n)的最小帶權路徑。矩陣的每個格子表示的是通過這個格子的代價。到達(m, n)的路徑總代價是這條路上所有代價和(包括出發點和終點)。你只可以從當前的格子向下,向右,或者對角線移動到下面的格子。例如給定(i, j),只可以移動到cells (i+1, j),(i, j+1) 和(i+1, j+1)。你可以假設所有的成本都是正整數。
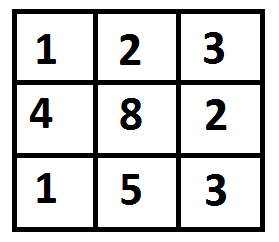
例如,在下面的圖中,到(2, 2)的最小帶權路徑是啥?
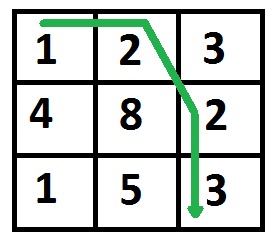
最小帶權路徑在下面的圖中已經標記出來了,路徑是(0, 0) –> (0, 1) –> (1, 2) –> (2, 2)。路徑的成本是8 (1 + 2 + 2 + 3)。
1)最優的子結構
到達 (m, n) 的路徑必須通過下面三個格子中的一個:(m-1, n-1)或者(m-1, n)或者(m, n-1)。所以到達(m, n)的最小成本快一些寫成“到達三個格子的最小值加上cost[m][n]”。
minCost(m, n) = min (minCost(m-1, n-1), minCost(m-1, n), minCost(m, n-1)) + cost[m][n]
2)重複的子問題
下面是MCP(Minimum Cost Path)問題的一個比較簡單的遞迴實現了。這個實現就是根據上面的遞迴結構來寫的。
/* A Naive recursive implementation of MCP(Minimum Cost Path) problem */ 應該注意的是,上面的方法重複計算了一些子問題,看下面這個遞迴樹,有許多節點出現了多次,這個遞迴的時間複雜度是指數級的,執行起來超慢。
mC refers to minCost()
mC(2, 2)
/ | \
/ | \
mC(1, 1) mC(1, 2) mC(2, 1)
/ | \ / | \ / | \
/ | \ / | \ / | \
mC(0,0) mC(0,1) mC(1,0) mC(0,1) mC(0,2) mC(1,1) mC(1,0) mC(1,1) mC(2,0) 所以MCP問題有動態規劃的兩個屬性(重複子問題與最優子結構),就像其他典型的DP問題一樣,可以通過自底向上地構建一個臨時陣列tc[][]來避免重複計算相同的子問題。
/* Dynamic Programming implementation of MCP problem */
#include<stdio.h>
#include<limits.h>
#define R 3
#define C 3
int min(int x, int y, int z);
int minCost(int cost[R][C], int m, int n)
{
int i, j;
// Instead of following line, we can use int tc[m+1][n+1] or
// dynamically allocate memoery to save space. The following line is
// used to keep te program simple and make it working on all compilers.
int tc[R][C];
tc[0][0] = cost[0][0];
/* Initialize first column of total cost(tc) array */
for (i = 1; i <= m; i++)
tc[i][0] = tc[i-1][0] + cost[i][0];
/* Initialize first row of tc array */
for (j = 1; j <= n; j++)
tc[0][j] = tc[0][j-1] + cost[0][j];
/* Construct rest of the tc array */
for (i = 1; i <= m; i++)
for (j = 1; j <= n; j++)
tc[i][j] = min(tc[i-1][j-1], tc[i-1][j], tc[i][j-1]) + cost[i][j];
return tc[m][n];
}
/* A utility function that returns minimum of 3 integers */
int min(int x, int y, int z)
{
if (x < y)
return (x < z)? x : z;
else
return (y < z)? y : z;
}
/* Driver program to test above functions */
int main()
{
int cost[R][C] = { {1, 2, 3},
{4, 8, 2},
{1, 5, 3} };
printf(" %d ", minCost(cost, 2, 2));
return 0;
}輸出:
8這個實現的時間複雜度是 O(mn),這比前面那個簡單的遞迴實現好多了。