基於ROS indigo版本下kinect影象顯示
阿新 • • 發佈:2019-02-17
安裝相關庫 及kinect驅動檔案
$ sudo apt-get install ros-indigo-openni-* ros-indigo-openni2-* ros-indigo-freenect-*
$ rospack profile 新建Terminal
$ roscore新建Terminal,執行Kinect驅動檔案
$ roslaunch freenect_launch freenect.launch新建Terminal,顯示RGB影象
$ rosrun image_view image_view image:=/camera/rgb/image_color新建Terminal,顯示Depth影象
$ rosrun image_view disparity_view image:=/camera/depth/disparity新建Terminal,執行RVIZ
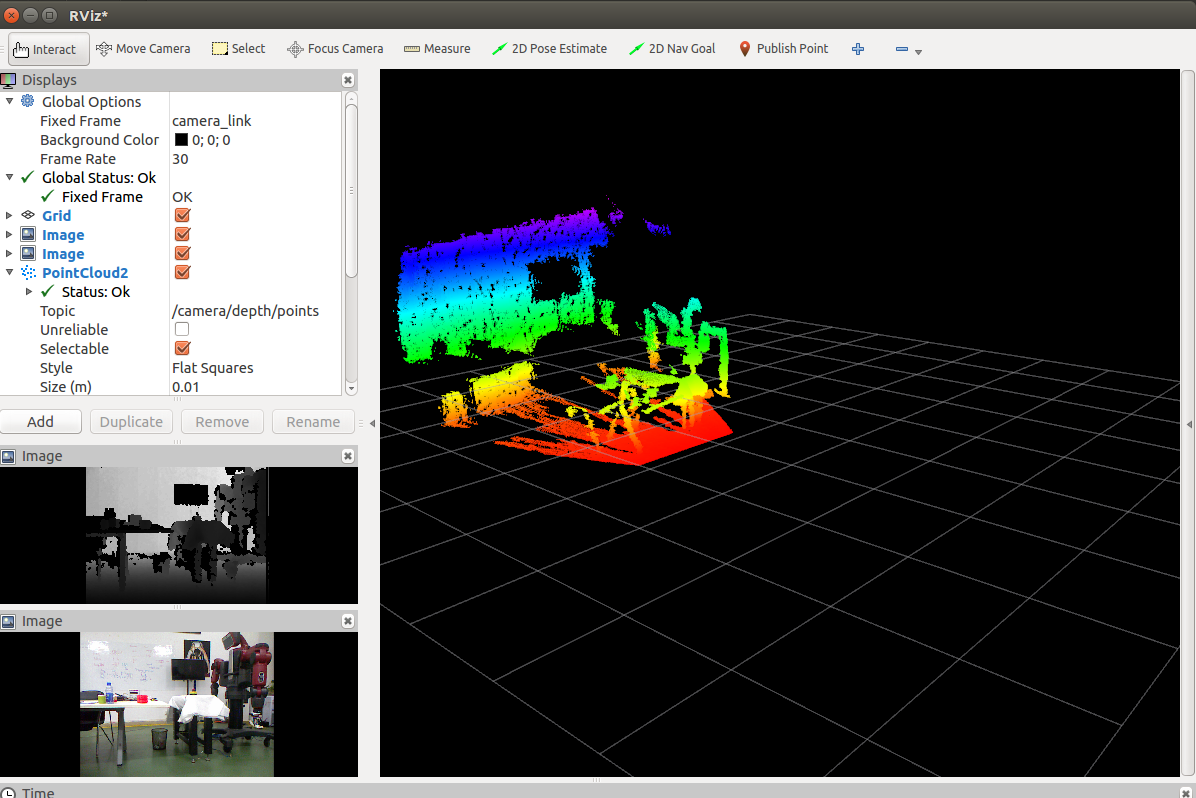
$ rosrun rviz rvizRVIZ 配置
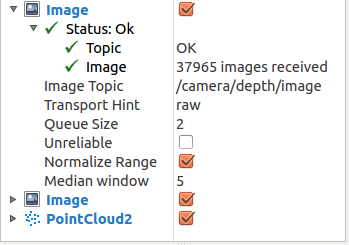
1.如圖新增 image,按圖修改屬性顯示RGB
2如圖新增 image,按圖修改屬性顯示Depth影象
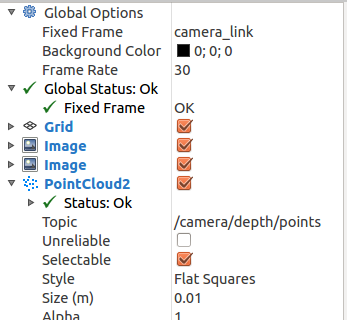
3.修改Global Options->Fixed Fram為 camera link,
4.新增PointCloud2型別,PointCloud2屬性按圖示修改,顯示點雲檔案。