
ROS學習筆記(零):ROS安裝
阿新 • • 發佈:2018-11-13
官方安裝ROS說明:
http://wiki.ros.org/Installation/Ubuntu?distro=kinetic
安裝流程:
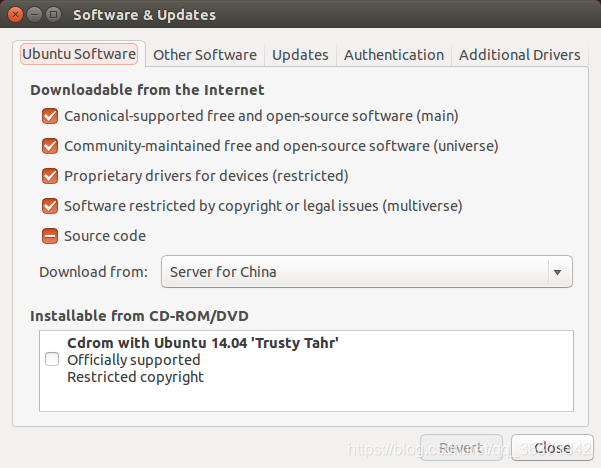
1.配置Ubuntu倉庫,“restricted,” “universe,” and “multiverse.” 可介面軟體更新那進行設定。
2.安裝源
sudo sh -c ‘echo “deb http://packages.ros.org/ros/ubuntu $(lsb_release -sc) main” > /etc/apt/sources.list.d/ros-latest.list’
3.新增Key
sudo apt-key adv --keyserver hkp://ha.pool.sks-keyservers.net:80 --recv-key 0xB01FA116
4.更新
sudo apt-get update
5.安裝
sudo apt-get install ros-kinetic-desktop-full
6.解決依賴
sudo rosdep init
rosdep update
7.環境設定
echo “source /opt/ros/kinetic/setup.bash” >> ~/.bashrc source
source ~/.bashrc
8.安裝rosinstall,便利的工具
sudo apt-get install python-rosinstall