HY-SRF05超聲波測距
阿新 • • 發佈:2018-12-04
1. 模組(OUT腳不知有什麼用)

2. 工作原理

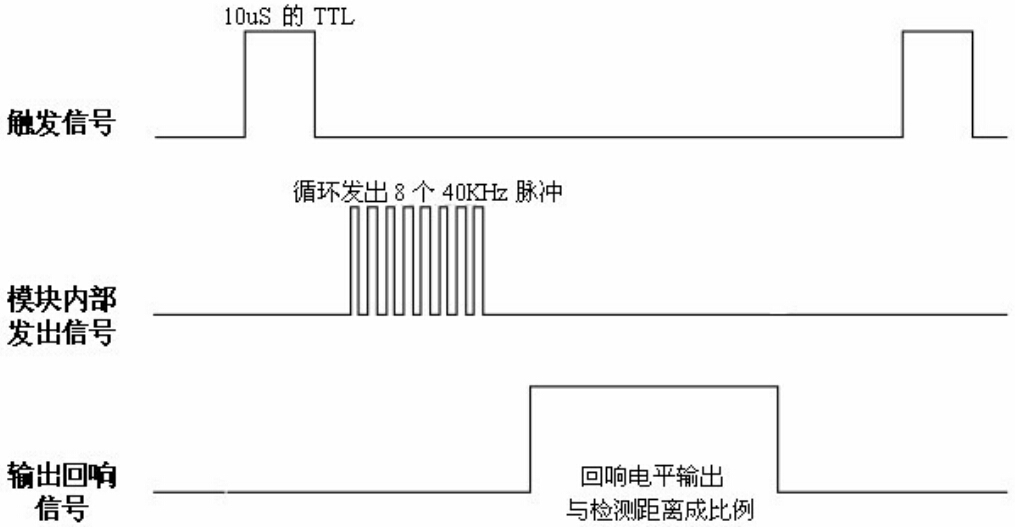
3. 時序圖
4. 計算公式

5. 51測試原始碼,串列埠顯示
/**********************************************************************************
* 功能:HY-SRF05超聲波測距模組測試,通過串列埠列印
* 處理器:STC89C52RC
* 晶振:11.0592
* 編譯環境:Keil uVision4
* 時間:2015-12-10
* 作者:ly
* 備註:Trig --- P1_0
* Echo --- 外部中斷0(P3_2)
* OUT ---
* Vcc --- VCC
* GND --- GND
**********************************************************************************/