
機器人關節數學模型
一個典型的多關節機器人如圖所示。

機械手動力學模型的特點:
1、動力學模型包含的項數多。隨著機器人關節數的增加,方程中包含的項數增加。
2、高度非線性,方程的每一項都含有正弦餘弦等非線性因素。
3、高度耦合。
4、模型不確定性和時變性。當機器人搬運物體時,由於所持物件不同,負載會發生變化,另外,關節的摩擦力矩也會隨時間變化。
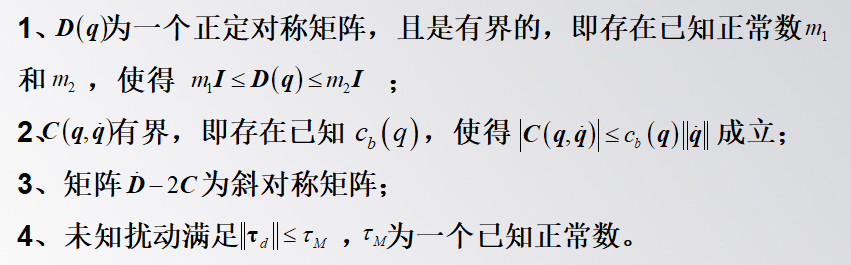
機械手動力學模型有以下幾個特性:
相關推薦
機器人關節數學模型
一個典型的多關節機器人如圖所示。 機械手動力學模型的特點: 1、動力學模型包含的項數多。隨著機器人關節數的增加,方程中包含的項數增加。 2、高度非線性,方程的每一項都含有正弦餘弦等非線性因素。 3、高度耦合。 4、模型不確定性和時變性。當機器人搬運物體時,由於所持物件不同,負載會發生變化,另外,關節
幽默感也有套路:可用數學模型量化
簡單的 urn pos 產生 衡量 證明 chris 打分 雜誌 摘自: https://wap.ithome.com/html/297978.htm 我們如何量化幽默感呢?它是如此復雜又個性化。來自阿爾伯塔大學的研究者們為此量身定做了一個數學模型,發現幽默或許不僅僅關乎
數學模型:3.非監督學習--聚類分析 和K-means聚類
rand tar 聚類分析 復制 clust tle 降維算法 generator pro 1. 聚類分析 聚類分析(cluster analysis)是一組將研究對象分為相對同質的群組(clusters)的統計分析技術 ---->> 將觀測對象的群體按照
加速度計和陀螺儀的數學模型和基本演算法
本帖轉自http://www.geek-workshop.com/thread-1695-1-1.html 本帖翻譯自IMU(加速度計和陀螺儀裝置)在嵌入式應用中使用的指南。 這篇文章主要介紹加速度計和陀螺儀的數學模型和基本演算法,以及如何融合這兩者,側重演算法、思想的討論 _________
六自由度機器人關節座標系變換及機器人工具TCP
在Jungle的上一篇部落格裡簡單介紹了機器人位姿描述與座標變換的基本知識(矩陣)其中關鍵點之一是變換運算元的左乘和右乘: 變換運算元左乘:表示該變換是相對固定座標系變換 變換運算元右乘:表示該變換是相對動的座標系(新座標系)變換。 這一節裡Jungle將在上一篇文章和變
拉格朗日法建立六軸機器人TX90動力學模型
參考書籍,感謝這本書的作者讓我對雅克比矩陣有了更加深刻的認識: 以下是我建模的相關草稿: 草稿有點凌亂,沒有整理,詳細建模過程可參考以下程式碼,筆者最後反對稱性沒有驗證出來,可能有地方出問題了,相關程式碼如下: function [ T ]
數學模型的過擬合和欠擬合
1. 過擬合 1.1 產生原因 訓練集中的資料抽取錯誤,太少,或者不均衡,不足以有效代表業務邏輯或場景; 訓練集中的資料噪音(異常值)干擾過大; 訓練模型的“邏輯假設“到了模型應用時已經不能成立 引數太多,模型複雜度太高; 特徵量太多,模型訓練過度,比如決策樹模型,神經網路模型
主題模型TopicModel:LDA中的數學模型
瞭解LDA需要明白如下數學原理:一個函式:gamma函式四個分佈:二項分佈、多項分佈、beta分佈、Dirichlet分佈一個概念和一個理念:共軛先驗和貝葉斯框架兩個模型:pLSA、LDA(文件-主題,主題-詞語)一個取樣:Gibbs取樣估計未知引數所採用的不同思想:頻率學派
永磁同步電機向量控制(一)——數學模型
1. A、B、C三相座標系中PMSM數學模型 定子電壓方程: 結論:在A、B、C座標系下,可以看出電壓方程和磁鏈方程比較複雜,磁鏈的數值隨永磁同步電機定轉子之間的相對位置隨時間而變化,而電機運動方程是描述電機電磁轉矩與電機運動狀態之間的關係,方程
用數學模型向你解釋離婚
文章內容 A Mathematical Model of Sentimental Dynamics Accounting for Marital Dissolution 解釋離婚的情感動力學數學模型 背景 西方社會的離婚是普遍存在的。它提出了重大的科學和社會學問題,不管是理論
學術筆記·水環境數學模型在城市水環境綜合整治中的應用研究·一
水環境數學模型在城市水環境綜合整治中的應用研究·一 一、彙報提綱 1.調水工程是水體質量改善效果研究種的關鍵技術問題,研究以引江濟太工程為例 2.城市河湖景觀水體岸線形態設計中的水環境問題
關於差速移動機器人的運動學模型推導 1
在機器人的運動中,經常會涉及到航向推演。 下面這篇部落格寫的挺好的。 在學習機器人運動模型推導的時候,有看到 網上別人的推導過程,連結如下: 其中都有相對應的推導過程,但是,如果我只是在這 複製黏貼那就毫無意義了,這裡說一下我的推導思路,沒有做對應的近似,
模糊影象退化與去模糊的數學模型
一 影象退化模型 建立影象的退化模型即是將影象的降質的機理用數學的方式描述出來,這也是影象去模糊成功的重要因素。通常來說,影象的退化可以概括為初始的輸入影象f(x,y),經過退化函式k(x,y)作用後,再附加上隨機噪聲n(x,y),最後輸出為模糊影象g(x,y
非線性數學模型線性化
非線性模型的線性化 1 小偏差線性化方法 實際問題一定都是非線性的, 但是我們利用數學方法簡化這種非線性模型為線性模型, 使得系統容易處理. 在它的平衡工作點附近, 它可以看成是線性的.
神奇的e 死理性派的數學模型:拒絕掉前面37%=1/e的人(marriage problem)
在每期《非誠勿擾》節目上,面對一位位男嘉賓,24 位單身女生要做出不止一次“艱難的決定”:到底要不要繼續亮燈?把燈滅掉意味著放棄了這一次機會,繼續亮燈則有可能結束節目之旅,放棄了未來更多的選擇。 在現實中,面對男生們前仆後繼的表白,MM 們也少不了這樣的糾結。
和大家談談數學模型之美
“我接觸數學模型是從一本書開始的。那時候,還是改革開放的初期,翻譯者們帶回國《數學模型》這本書,
[數學模型]商人怎樣安全過河
問題描述 三名商人各帶一個隨從乘船渡河,一隻小船隻能容納兩人,由於他們自己划行,隨從密約,在和的任一岸,一旦隨從的人數比商人多,就殺人越貨,但是如何安排乘船的大權安排在商人們的手中,商人們怎樣才能安全渡河? 模型假設 我們需要對問題做一些假設:
數學之美 系列十四 談談數學模型的重要性
糾正地心說錯誤不是靠在托勒密四十個圓的模型上再多套上幾個圓,而是進一步探索真理。哥白尼發現,如果以太陽為中心來描述星體的執行,只需要 8-10 個圓,就能計算出一個行星的運動軌跡,他提出了日心說。很遺憾的事,哥白尼正確的假設並沒有得到比托勒密更好的結果,哥白尼的模型的誤差比托勒密地要大不少。這是教會和當時人們
建立動態規劃數學模型的步驟
“最優化原理”是動態規劃的核心,所有動態規劃問題的遞推關係都是根據這個原理建立起來的,並且根據遞推關係依次計算,最終可求得動態規劃問題的解。一般來說,利用動態規劃求解實際問題需先建立問題的動態模型,具體步驟如下:⒈將問題按時間或空間次序劃分成若干階段。有些問題不具有時空次序,也可以人為地引進時空次序,