
機器學習反向傳播演算法的數學推導
阿新 • • 發佈:2018-12-26
周志華的西瓜書機器學習被譽為是機器學習的入門寶典,但是這本書對於深度學習的知識介紹非常少,僅僅只是在第五章《神經網路》中對其進行簡單的概括。
這一章對於深度學習的介紹非常淺顯,沒有很深入的對其中的知識進行挖掘,也沒有很複雜的數學推導。
博主在這裡對反向傳播演算法進行數學推導,這裡我使用的方法和周老師有些不同,或許更方便一些。
一、反向傳播演算法概述
誤差反向傳播演算法又稱為BP演算法,是由Werbos等人在1974年提出來的,我們熟知的Hinton也對該演算法做出非常巨大的貢獻。這是一種在神經網路中最為有效的訓練演算法,直到現在還在深度學習中發揮著極其重要的作用。
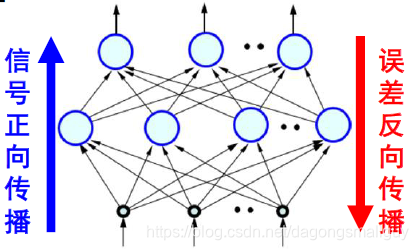
它是利用輸出後的誤差來估計輸出層前一層的誤差,再用這個誤差估計更前一層的誤差,如此一層一層地反傳下去,從而獲得所有其它各層的誤差估計。這是一種屬於有監督學習的方式,可以對網路中的連線權重做動態調整。
反向傳播演算法和正向傳播演算法相對應,一起構成了神經網路的整個過程:
二、數學推導
在這裡,為方便對模型的理解和數學推導,我們沒有采用西瓜書中的模型表示方式,而是用下圖來對其進行簡化:
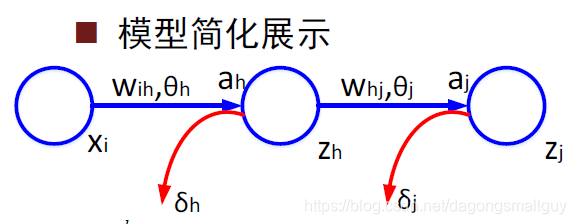
- 與輸入層相關的變數和引數:下標
- 與隱含層相關的變數和引數:下標
- 與輸出層相關的變數和引數:下標
- 激勵函式的輸入:
- 激勵函式的輸出:
- 節點誤差:
則輸入隱藏層和輸出層的量分別為:
隱含層和輸出層的的輸出分別是:
函式的誤差損失為:
BP演算法是基於梯度下降的策略,以目標的負梯度方向對引數進行調整,所以我們用鏈式法則求出誤差的梯度為:
由前文我們得到的關係有:
所以,綜上所得,我們有: