
Cs231n課堂內容記錄-Lecture 7 神經網路訓練2
Lecture 7 Training Neural Networks 2
課堂筆記參見:https://zhuanlan.zhihu.com/p/21560667?refer=intelligentunit
本節課主要講述比較常用的優化演算法,正則化方法以及遷移學習。
一、 優化:
隨機梯度下降演算法是有一些問題的,如圖所示,如果目標類似於山坡的最低點,而我們的權重方向W1,W2正好一個豎直,一個水平,對應海森矩陣的最大奇異值和最小奇異值,那麼Loss將會對水平更新非常不敏感。這是我們的SGD演算法會有什麼表現呢?就像如圖所示的之字形軌跡一樣,一遍遍地越過等高線而不能做到沿著曲面下降。因為SGD演算法是沿著超平面上下降最快的方向走的,這個方向可能並沒有指向最優點。這張圖中下降最快的方向明顯是豎直方向,水平方向對Loss的貢獻度低導致水平方向基本不移動,這就導致軌跡總是在上下跳動而並沒有向最優點顯著移動。
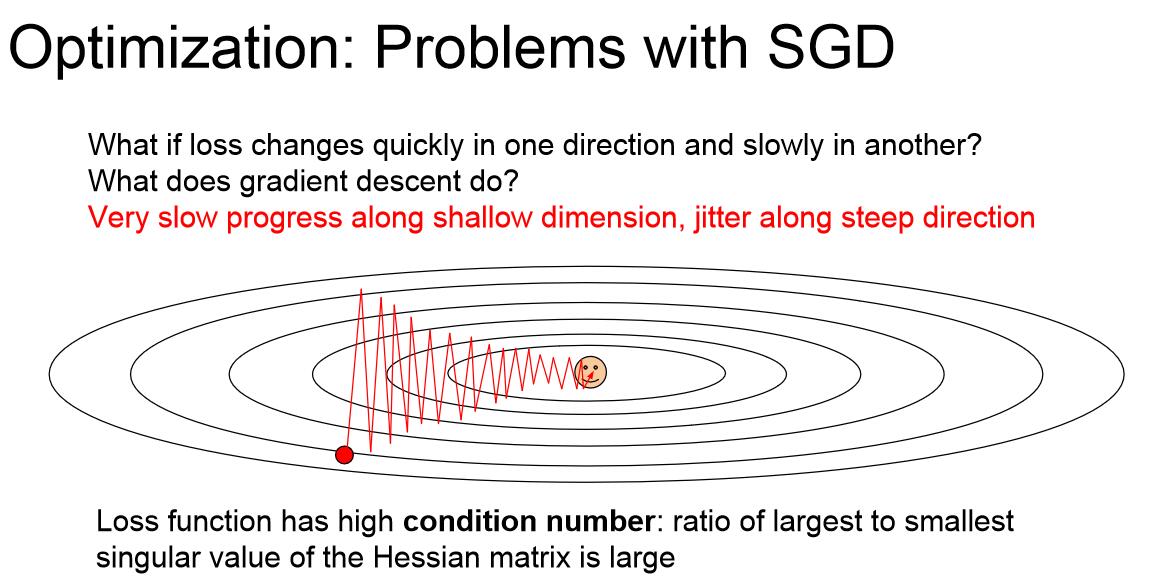
SGD的第二個問題是容易陷入區域性極小值。另外對於鞍點(斜率為0)來說,SGD同樣會導致函式卡在這一點。在高維問題中,鞍點意味著在當前點上某些方向的損失會增加,某些方向的損失會減小,這種情況在你的引數非常多時是很常見的,而區域性極小值意味著在所有方向上行進損失都會增加,在高維網路中這種情況反而並不常見。問題更多地出現在鞍點上。在鞍點附近,梯度值非常小,所以梯度更新會變得異常緩慢。
第三個SGD的問題來源於Stochastic,我們通常不用全部資料來計算Loss,因為每一次迭代都意味著巨大的計算量,我們往往在每一個小batch上計算Loss和梯度作為估計值,這時如果我們在網路中加入隨機噪聲,我們會發現隨機噪聲的影響會變得很大,因為梯度下降的隨機性可能會使選擇出來的資料中噪聲成分偏多。在使用所有資料時,這種隨機性依然會導致結果受到網路中噪聲的影響。
這三個問題都能用一個簡單的技巧解決,就是在SGD中加入動量項。
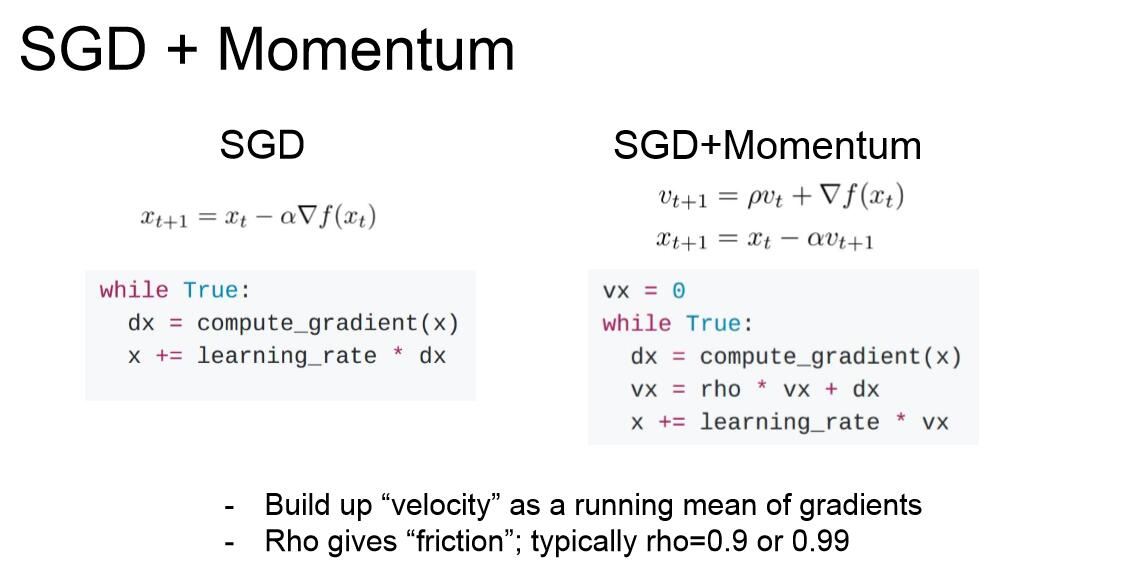
當然這種動量法並不是純粹物理意義上的動量,而是說梯度更新項會在一定程度上保持原有的趨勢(不再是SGD的任意變化),ρ可以理解為是摩擦係數,表示對原梯度值項的衰減因子。這個策略基本解決了我們剛才討論的所有問題。速度項一般初始化為0。
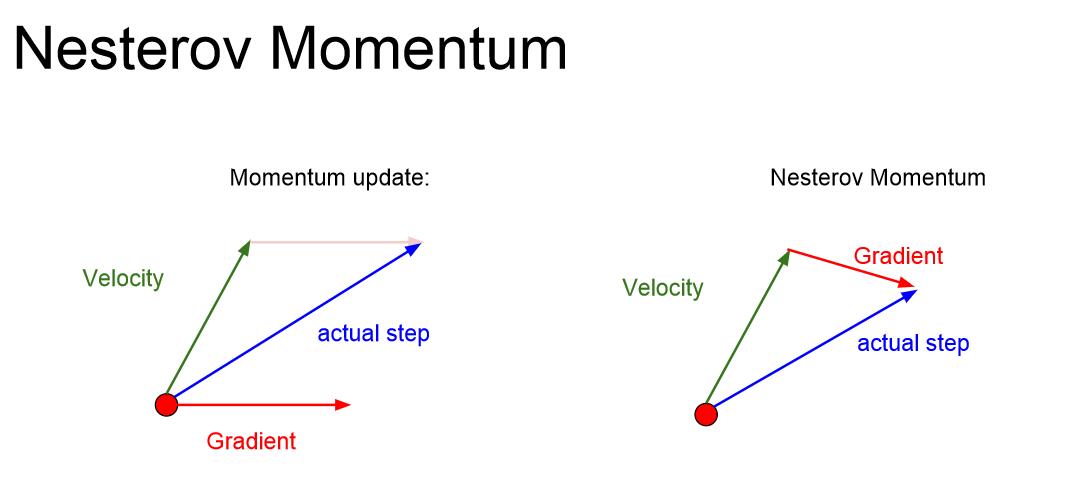
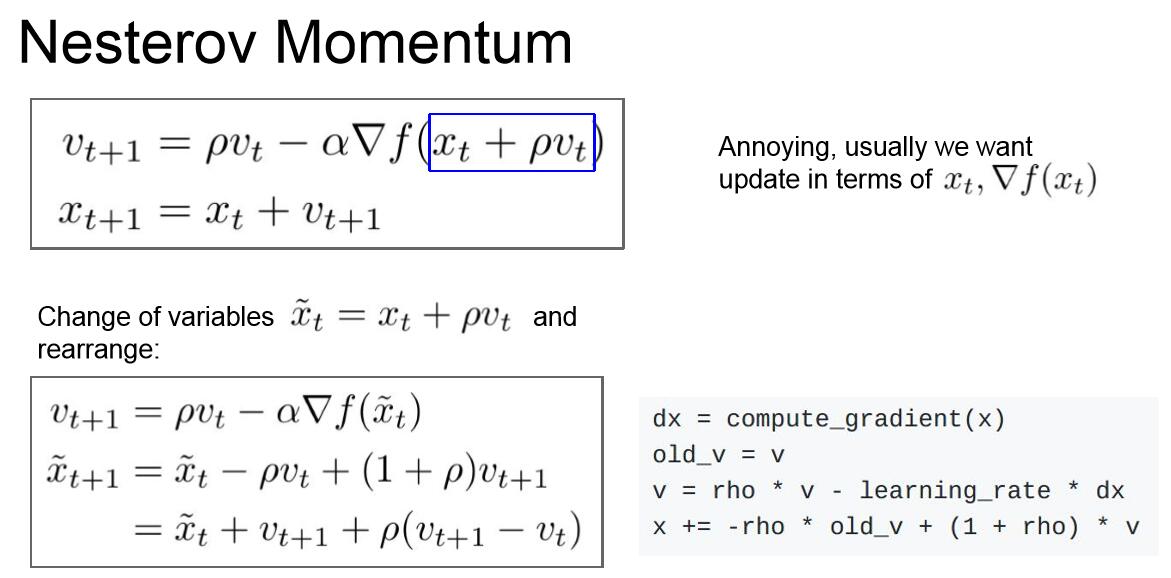
另一種動量方法的思路是Nesterov Momentum:

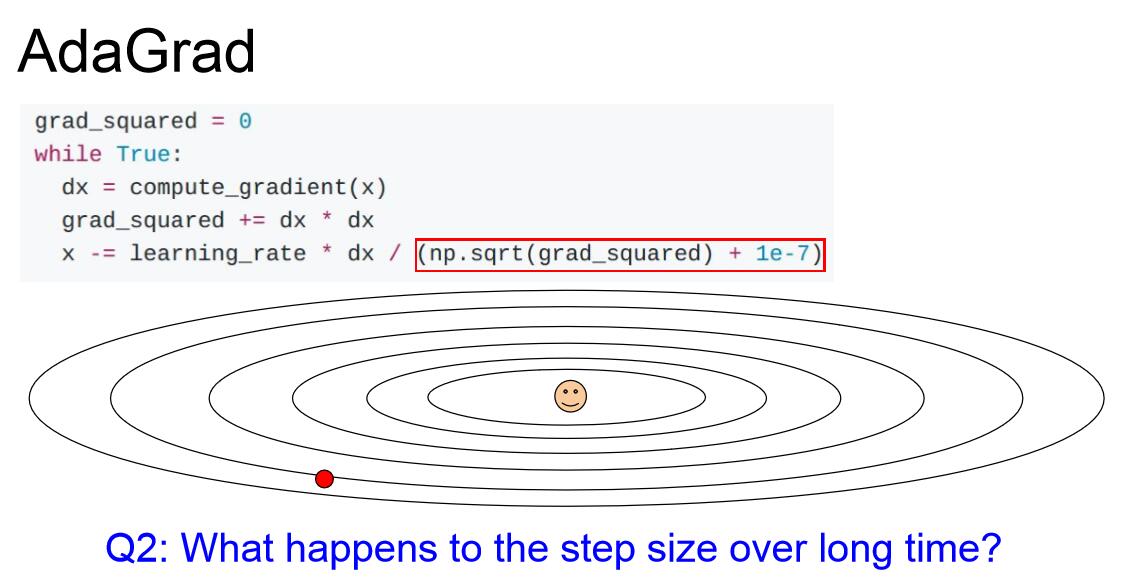
另一種優化思路是斯坦福的John Duchi教授提出的AdaGrad,其核心思想是計算每一步梯度的平方,累加求和,並讓引數更新的時候除以這個平方和的平方根。這樣如果我們有如上問題二所說的兩個W方向,豎直方向得到的大梯度值會使實際的梯度更新較小,而水平方向上的小梯度值會使實際的梯度更新較大,從而解決了問題二。但是隨著迭代次數增加,步長會越來越小,這在凸函式逼近中是一個優勢,但是非凸函式情形很容易被區域性極小值困住。
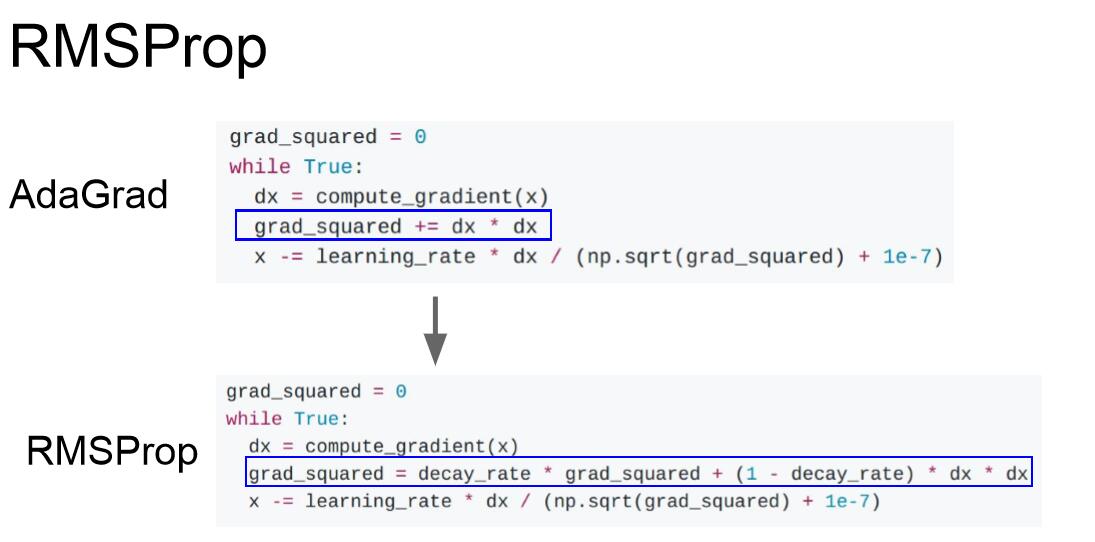
AdaGrad的一個變體是RMSProp,引入了衰減率decay_rate,衰減率通常為0.9或者0.99,用以解決隨著迭代次數增加而使步長減小的問題。但是訓練速度可能會變慢。
Adam(初期)演算法是Momentum 和 RMSProp的結合。相當於在dx,x之間加入了兩個變換,dx-first_moment-second_moment-x,分別引入了動量和RMSProp,
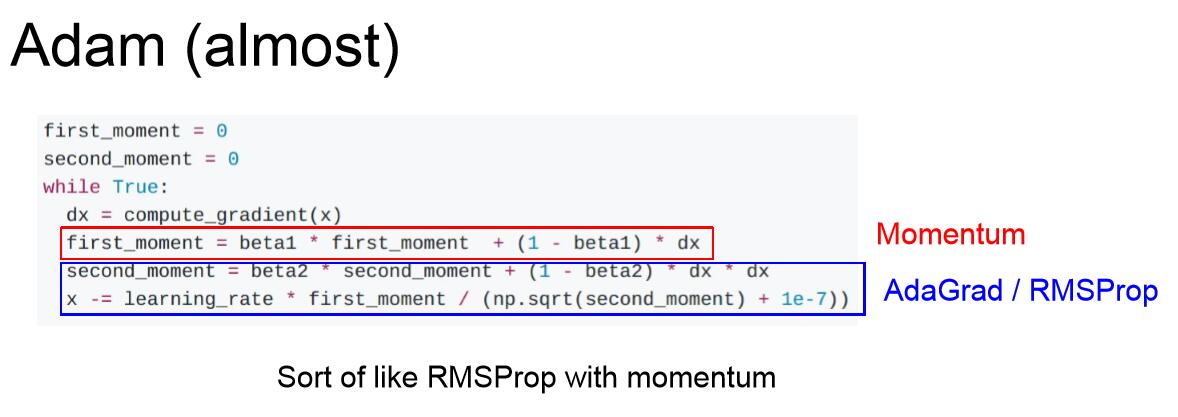
然而,如果我們看第一步就會發現,初始值第一、二動量都是零,beta2是0.9或者0.99,所以第一次更新後,第二動量依然很小,這就導致第一步的步長很大。
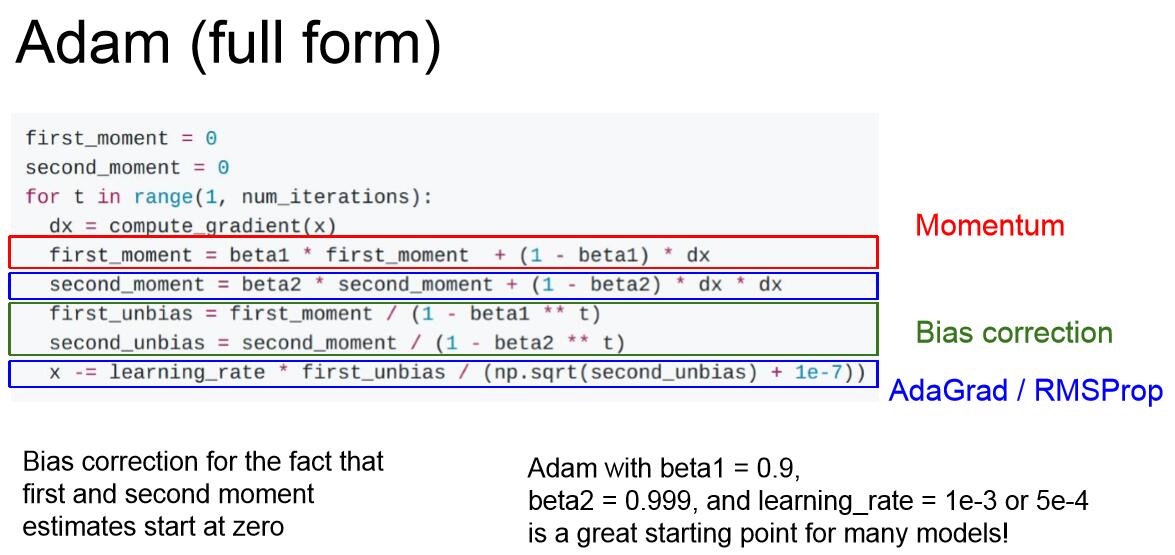
完善後的Adam引入了偏置校正項,以避免一開始的大步長。Adam幾乎對於所有問題表現都很好,所以可以作為我們的預設優化演算法。上圖中有初始設定值的推薦。
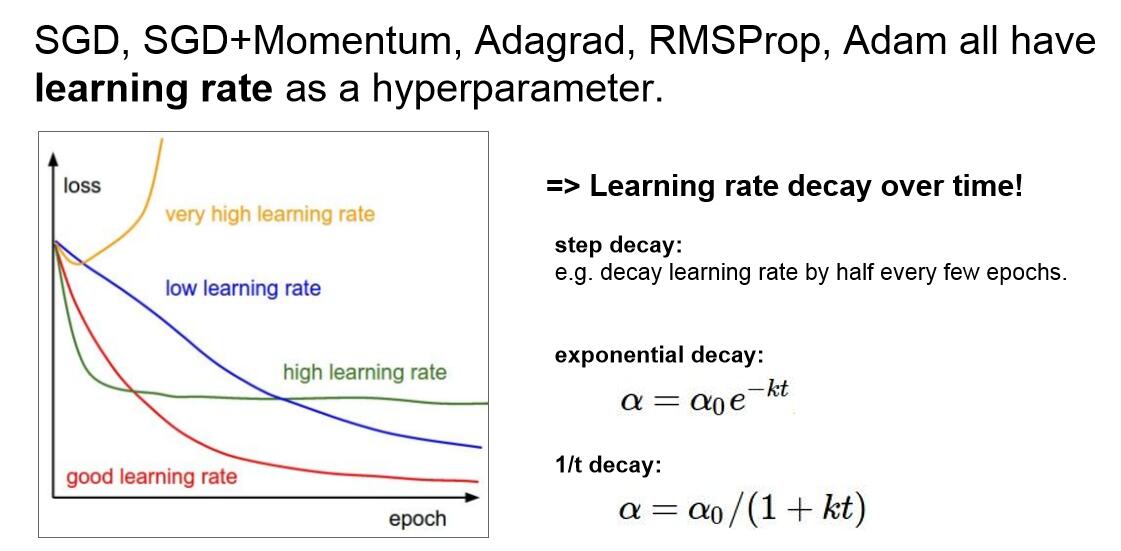
Tips:學習率的設定:
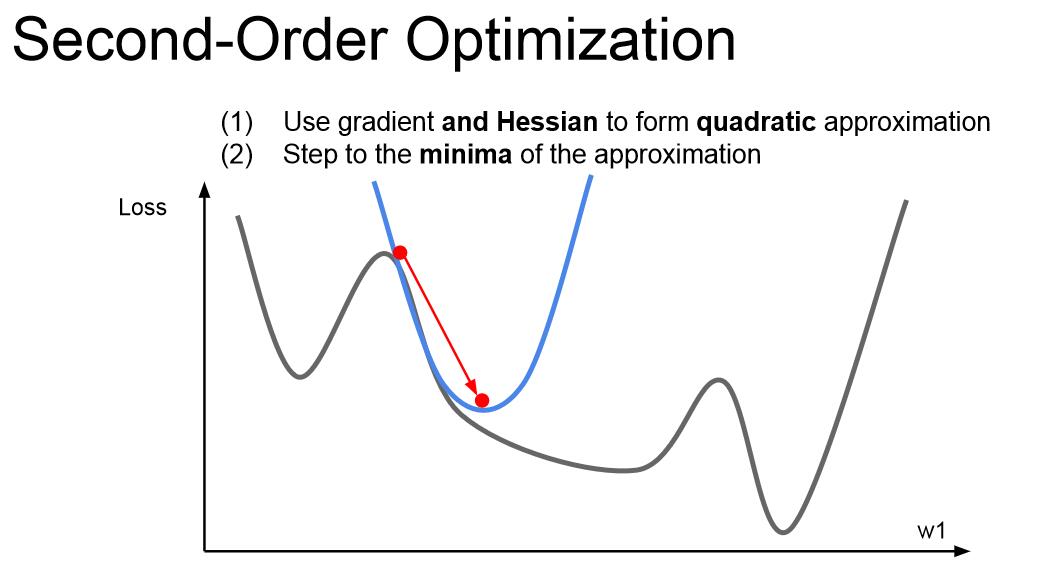
我們之前所講的都是一階求導的梯度更新,如果你結合一維變數的二階求導,然後做一個二階泰勒逼近,就可以用一個二次函式逼近我們的函式,可以直接跳到函式點的對應最小值點,這就是二階優化的思想。將問題拓展到多維變數,就是牛頓步長的概念。我們要做的是計算海森矩陣(二階偏導矩陣),求這個矩陣的逆,以找到二次逼近後的最小值。這個演算法就沒有學習率的概念了,但是實際運用中我們也會用到學習率,因為這個演算法也不是那麼完美。
不過,這個演算法不適合深度學習,因為海森矩陣是N*N的矩陣(N是網路引數的數量),記憶體是無法存下這個矩陣的。所以人們經常使用擬牛頓法來替代牛頓法,不直接去求完整的Hessian矩陣的逆,而是去逼近這個矩陣的逆,常用的是低階逼近。
L-BFGS就是一個二階優化器,採用了Hessian矩陣的二階逼近,不過對很多深度學習問題不適用,因為這種逼近演算法對隨機情況的處理不是那麼好,在非凸問題表現也不是很好。當你的網路引數不是很多,隨機性也不是很強的時候,L-BFGS有時候會發揮好的效果。
如何減小訓練集和驗證集Loss的差距呢?一個簡單的方法是模型整合(Model Ensembels),相比於訓練一個模型,我們選擇從不同的隨機初始值上訓練10個不同的模型,然後在這樣的10個模型上執行測試資料,然後平均預測結果,這樣可以在一定程度上緩解過擬合,從而提高預測結果。如果發揮一定的想象力,我們並不一定需要真的去訓練10個不同的模型,而是在訓練過程中獲取模型的快照(snapshots),來進行整合學習。在測試階段,我們將這些快照預測結果做平均。
另外一個trick是我們可以對不同訓練時刻的模型引數求指數衰減平均值,從而得到一個比較平滑的整合模型,這叫做Polyak averaging,但事實上並不常用。