
基於MATLAB的Sobel邊緣檢測演算法實現
影象邊緣就是影象灰度值突變的地方,也就是影象在該部分的畫素值變化速度非常之快,就比如在座標軸上一條曲線有剛開始的平滑突然來個大轉彎,在變化出的導數非常大。
Sobel運算元主要用作邊緣檢測,它是一離散型差分運算元,用來計算影象亮度函式灰度之近似值。
邊緣是指其周圍畫素灰度急劇變化的那些畫素的集合。邊緣存在於目標、背景和區域之間,所以,邊緣是影象分割所依賴的最重要的依據。由於邊緣是位置的標誌,對灰度的變化不敏感,因此,邊緣也是影象匹配的重要的特徵。
Sobel邊緣檢測的核心在於畫素矩陣的卷積,卷積對於數字影象處理非常重要,很多影象處理演算法都是做卷積來實現的。卷積運算的本質就是對指定的影象區域的畫素值進行加權求和的過程,其計算過程為影象區域中的每個畫素值分別與卷積模板的每個元素對應相乘,將卷積的結果作求和運算,運算到的和就是卷積運算的結果。
矩陣的卷積公式如下。
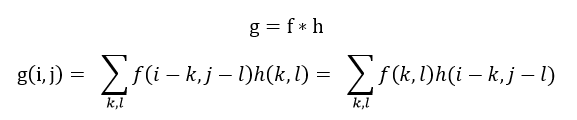
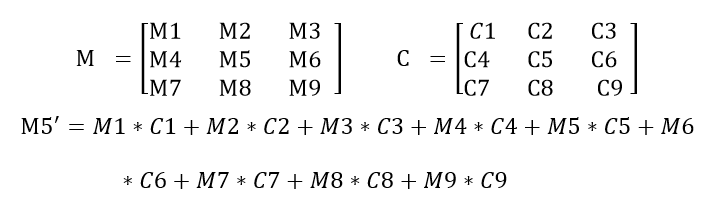
3x3的視窗M與卷積模板C的卷積運算如下。
Gx和Gy是sobel的卷積因子,將這兩個因子和原始影象做如下卷積。
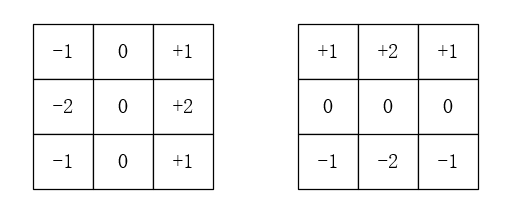
Sobel卷積因子
其中A代表原始影象。
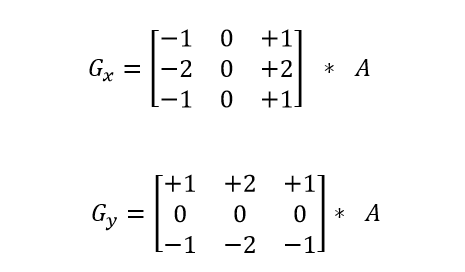
得到影象中的每一個點的橫向縱向灰度值Gx、Gy。最後通過如下公式來計算改變灰度的大小。
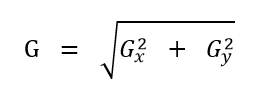
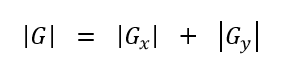
但是通常為了提高效率,使用不開平方的近似值,雖然這樣做會損失精度,,
將Sobel運算元的實現劃分為五個步驟:
(1) 計算Gx與Gy與模板每行的乘積。
(2) 兩個3x3矩陣的卷積即將每一行每一列對應相乘然後相加。
(3) 求得3*3模板運算後的Gx、Gy。
(4) 求Gx^2 + Gy^2的平方根或者直接對Gx和Gy取絕對值後求和。
(5)設定一個閾值,運算後的畫素值大於該閾值輸出為全1,小於該閾值輸出為全0。
平方根和絕對值函式
sqrt(x) 計算平方根
abs(x)取數值的絕對值和複數的幅值
在對影象資料進行運算時最好將影象資料轉化成double型別的,避免精度損失。
Sobel邊緣檢測MATLAB實現
Sobel Edge Detect

1 %RGB_YCbCr
2 clc;
3 clear all;
4 close all;
5
6 RGB_data = imread('lena.jpg');%
7
8 R_data = RGB_data(:,:,1);
9 G_data = RGB_data(:,:,2);
10 B_data = RGB_data(:,:,3);
11
12 %imshow(RGB_data);
13
14 [ROW,COL, DIM] = size(RGB_data);
15
16 Y_data = zeros(ROW,COL);
17 Cb_data = zeros(ROW,COL);
18 Cr_data = zeros(ROW,COL);
19 Gray_data = RGB_data;
20
21 for r = 1:ROW
22 for c = 1:COL
23 Y_data(r, c) = 0.299*R_data(r, c) + 0.587*G_data(r, c) + 0.114*B_data(r, c);
24 Cb_data(r, c) = -0.172*R_data(r, c) - 0.339*G_data(r, c) + 0.511*B_data(r, c) + 128;
25 Cr_data(r, c) = 0.511*R_data(r, c) - 0.428*G_data(r, c) - 0.083*B_data(r, c) + 128;
26 end
27 end
28
29 Gray_data(:,:,1)=Y_data;
30 Gray_data(:,:,2)=Y_data;
31 Gray_data(:,:,3)=Y_data;
32
33 figure;
34 imshow(Gray_data);
35
36 %Median Filter
37 imgn = imnoise(Gray_data,'salt & pepper',0.02);
38
39 figure;
40 imshow(imgn);
41
42 Median_Img = Gray_data;
43 for r = 2:ROW-1
44 for c = 2:COL-1
45 median3x3 =[imgn(r-1,c-1) imgn(r-1,c) imgn(r-1,c+1)
46 imgn(r,c-1) imgn(r,c) imgn(r,c+1)
47 imgn(r+1,c-1) imgn(r+1,c) imgn(r+1,c+1)];
48 sort1 = sort(median3x3, 2, 'descend');
49 sort2 = sort([sort1(1), sort1(4), sort1(7)], 'descend');
50 sort3 = sort([sort1(2), sort1(5), sort1(8)], 'descend');
51 sort4 = sort([sort1(3), sort1(6), sort1(9)], 'descend');
52 mid_num = sort([sort2(3), sort3(2), sort4(1)], 'descend');
53 Median_Img(r,c) = mid_num(2);
54 end
55 end
56
57 figure;
58 imshow(Median_Img);
59
60 %Sobel_Edge_Detect
61
62 Median_Img = double(Median_Img);
63 Sobel_Threshold = 150;
64 Sobel_Img = zeros(ROW,COL);
65 for r = 2:ROW-1
66 for c = 2:COL-1
67 Sobel_x = Median_Img(r-1,c+1) + 2*Median_Img(r,c+1) + Median_Img(r+1,c+1) - Median_Img(r-1,c-1) - 2*Median_Img(r,c-1) - Median_Img(r+1,c-1);
68 Sobel_y = Median_Img(r-1,c-1) + 2*Median_Img(r-1,c) + Median_Img(r-1,c+1) - Median_Img(r+1,c-1) - 2*Median_Img(r+1,c) - Median_Img(r+1,c+1);
69 Sobel_Num = abs(Sobel_x) + abs(Sobel_y);
70 %Sobel_Num = sqrt(Sobel_x^2 + Sobel_y^2);
71 if(Sobel_Num > Sobel_Threshold)
72 Sobel_Img(r,c)=0;
73 else
74 Sobel_Img(r,c)=255;
75 end
76 end
77 end
78
79 figure;
80 imshow(Sobel_Img);
處理後的圖片效果
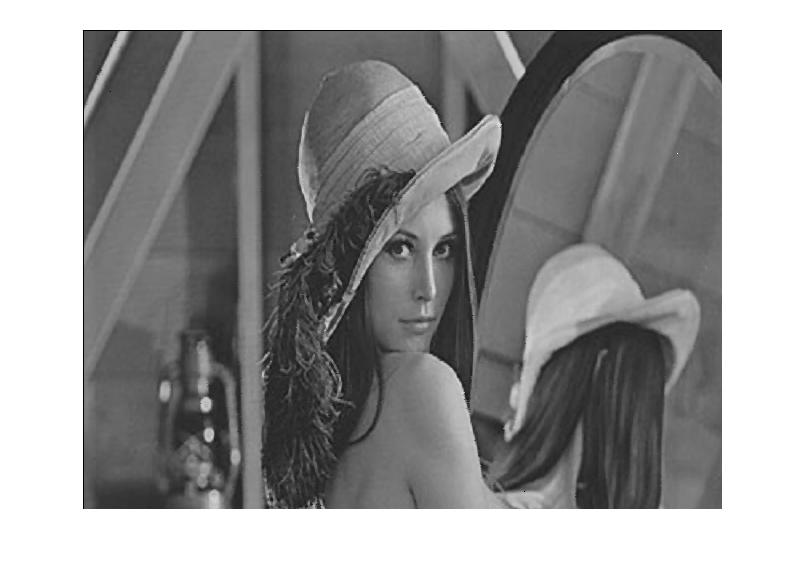
中值濾波後的lena
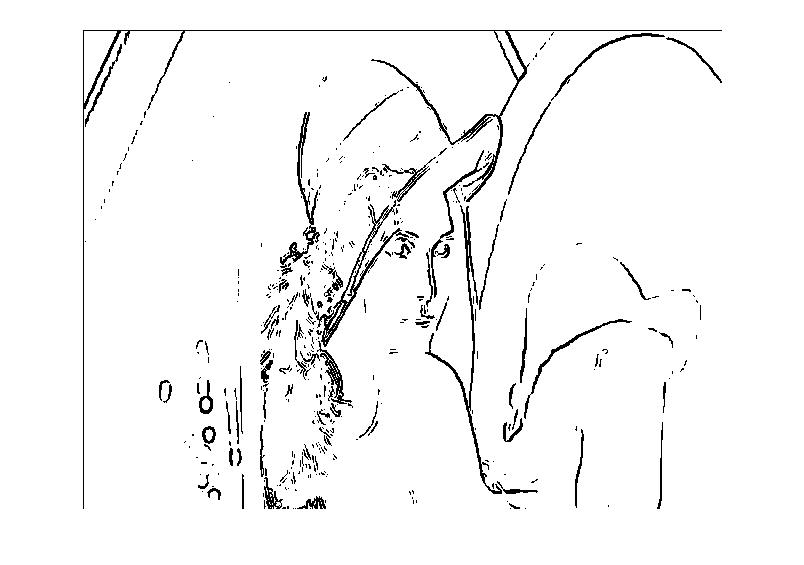
Sobel邊沿檢測後的lena
為了使影象邊緣更加明朗,可以在Sobel的基礎上再進行腐蝕膨脹處理,腐蝕膨脹處理,下一篇繼續分享。

轉載請註明出處:NingHeChuan(寧河川)
個人微信訂閱號:開源FPGA
如果你想及時收到個人撰寫的博文推送,可以掃描左邊二維碼(或者長按識別二維碼)關注個人微信訂閱號