
機器人手眼協調——機械臂自主抓取物體
聯絡方式:[email protected]
一. 實驗目的
KinectV2作為視覺輸入,獲取目標物體以及機械臂各關節在三維空間中的位置,結合幾何運動學和資料訓練方法實現機械臂自主抓取目標物體。
二. 實驗裝置

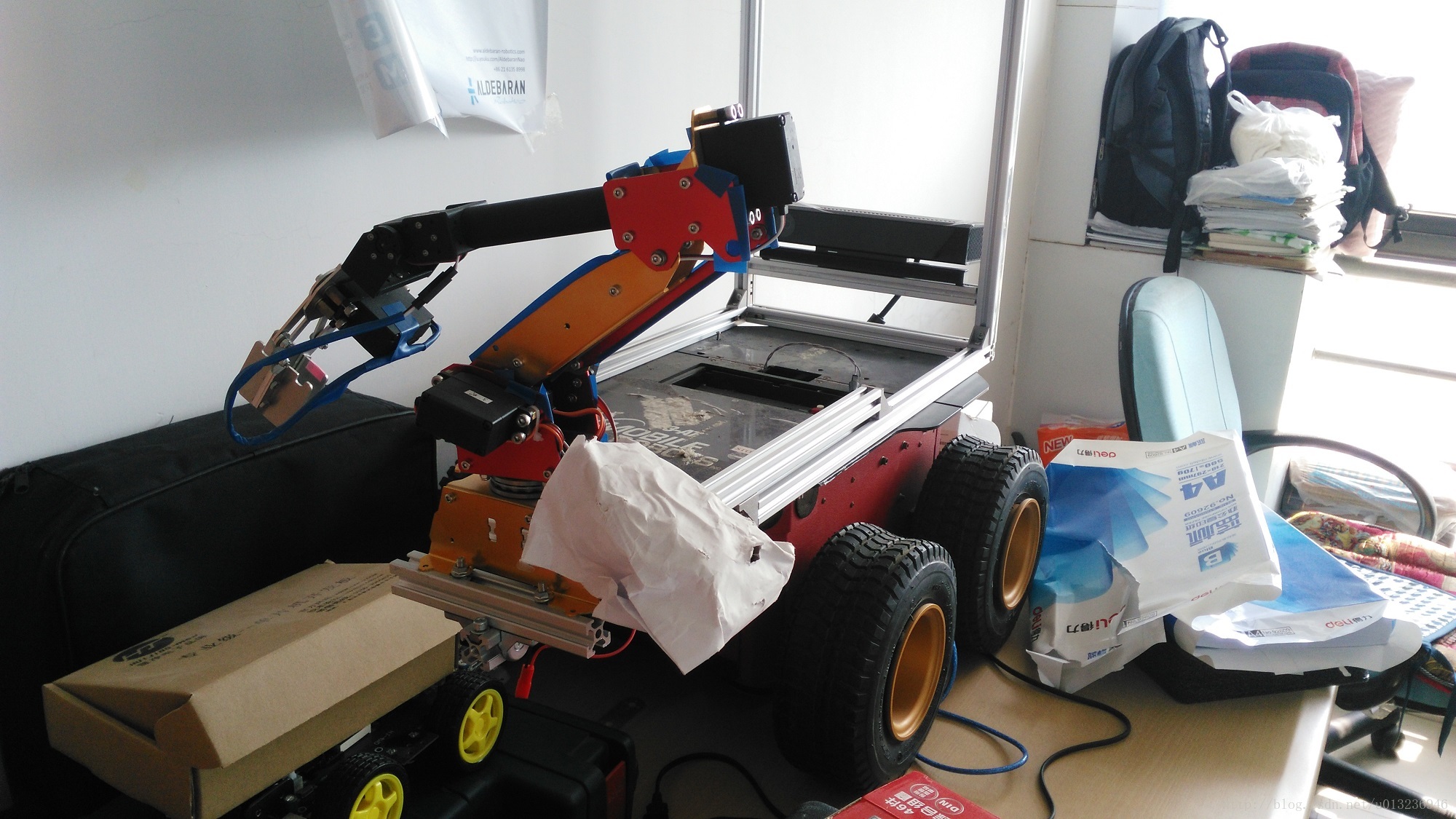
Kinect、六個舵機的五自由度平行四邊形機械臂
(安裝在Pioneer3移動機器人上)
機械臂
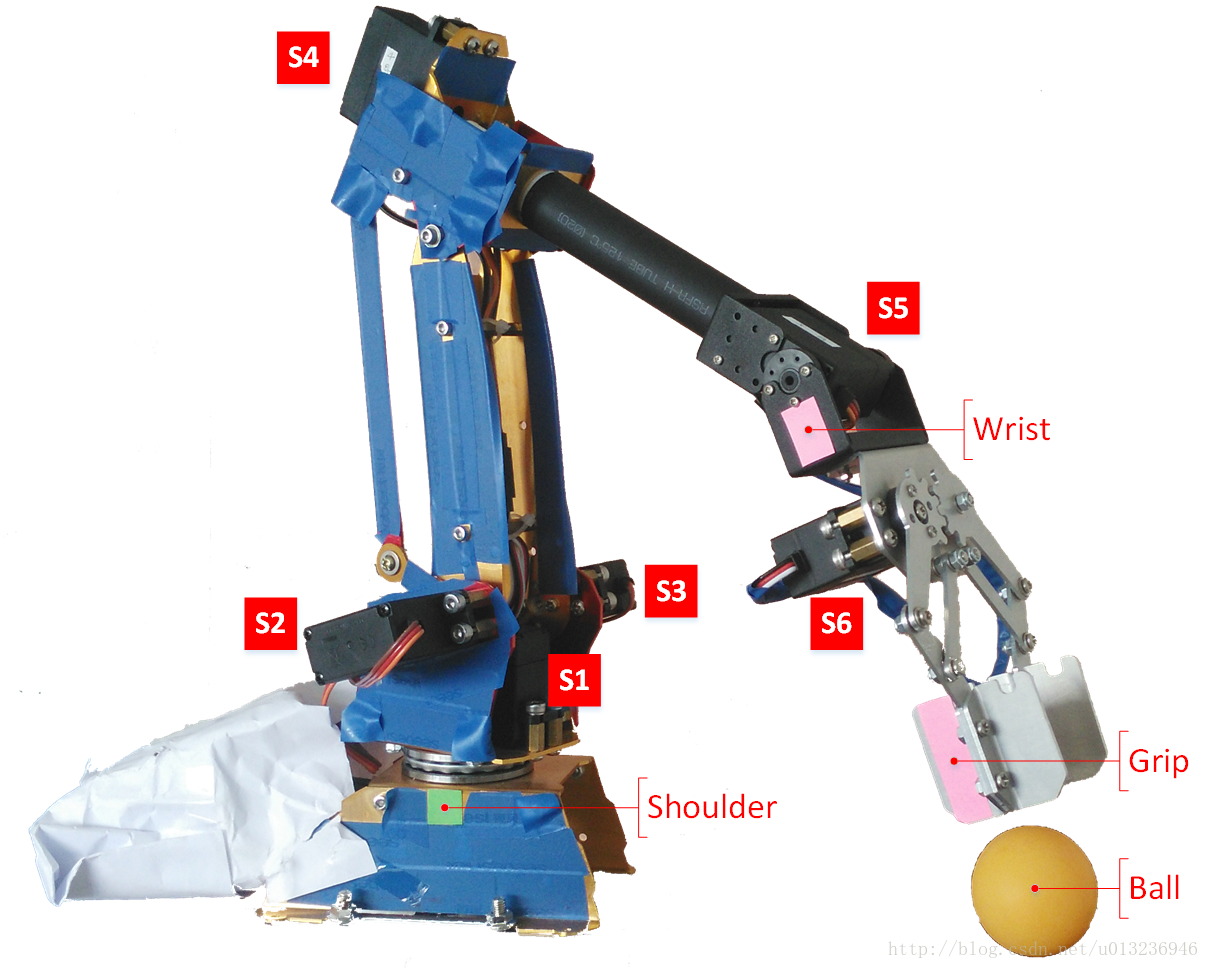
實驗使用的機械臂是具有六個舵機的五自由度平行四邊形機械臂。如上圖所示,S1~S3處舵機分別負責肩部、大臂、小臂的轉動,S4~S5負責腕部的兩個自由度轉動,S6負責抓取。每個舵機的轉動範圍是500-2500,換算成角度大約是0-180度。
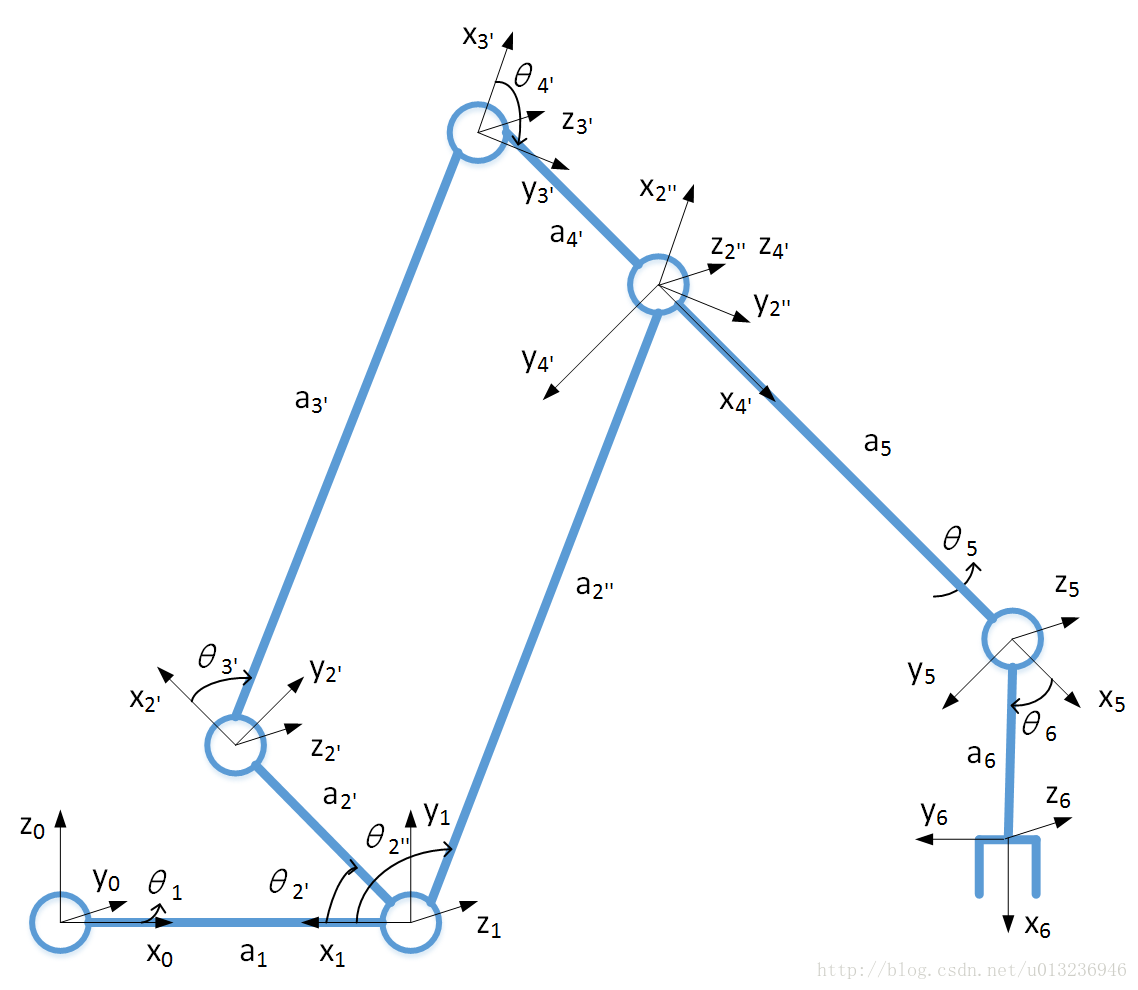
上圖是機械臂的結構圖,其中舵機S1負責
實驗只使用機械臂的4個自由度,即始終令
三. 演算法流程
- 標定機械臂各關節,從KinectV2獲取影象,經過處理得到關節點在空間中的座標,通過幾何運動學解算出此時各關節角的角度;
- 從KinectV2獲取影象,經過處理得到目標物體位置,通過幾何運動學解算出機械臂要抓到物體所要的角度(目標角度);
- 計算目標角度與當前角度的誤差,使用反饋控制減少誤差;
- 迴圈1~4步,當誤差足夠小時即可命令機械臂抓起物體。
以上4步是演算法的大致步驟。(除此之外,反饋控制使用的是自己設計的控制器,同時結合了資料訓練方法模擬人類抓取物體的方式)
四. 實驗結果
機械臂自主抓取物體
移動機器人尋跡
相關推薦
機器人手眼協調——機械臂自主抓取物體
聯絡方式:[email protected] 一. 實驗目的 KinectV2作為視覺輸入,獲取目標物體以及機械臂各關節在三維空間中的位置,結合幾何運動學和資料訓練方法實現機械臂自主抓取目標物體。 二. 實驗裝置 Kinect、
UR10 RG2機械臂手臂+RealsenseZR300 機器人手眼標定 系列第四篇
參考文章了連結: 跑了一個星期參考文章,一點點推進但是一直有問題,各種亂七八糟節點衝突 沒有釋出話題 ,座標系也老是跳,頁面出現閃退的情況,乾脆把文章寫的launch前面的幾步單獨拎出來跑,沒想到問題竟然就這樣解決了... IntelRealsense Z
HRG(4)——UR10 RG2機械臂手臂+RealsenseZR300 機器人手眼標定
1 IntelRealsense ZR300相機外參標定 首先,標定的原理是:基座標系(base_tree)和相機(camera_tree)兩個座標系屬於不同的tree,通過將標籤貼到手上,相機識別出標籤的position 和 orention,並通過hand_eye標定包得到marke
【機器人學】機器人開源專案KDL原始碼學習:(4)機械臂逆動力學的牛頓尤拉演算法
機械臂的逆動力學問題可以認為是:已知機械臂各個連桿的關節的運動(關節位移、關節速度和關節加速度),求產生這個加速度響應所需要的力/力矩。KDL提供了兩個求解逆動力學的求解器,其中一個是牛頓尤拉法,這個方法是最簡單和高效的方法。 牛頓尤拉法演算法可以分為三個步驟: step1:
ABB機械臂亂彈1-ABB機器人選項功能
ABBSystemOptions:選項功能 Industrial Networks 現場匯流排 709-1 DeviceNet Master/Slave 必備 888-2 PROFINET Controller/Device 888-3 PRO
HRG(3)——ROS IntelRealSenseZR300 PCL+ORK+Linemod 柱狀物體檢測 機械臂抓取
任務主線是深度相機看到物體是什麼、在哪兒,位姿傳送給機械臂進行抓取,這兩週主要解決了用深度相機檢測一個可樂罐以及釋出其位置資訊。 執行環境:Ubuntu16.04+ROS Kinetic+PCL 目前深度相機主要的方法有: 1.基於霍夫變換 (可以參考2010年的論文 ppf
機械臂(1)——機器人工具箱的獲取安裝
最近準備研究下機械臂的你運動分析,本文記錄相關過程。 1、首先獲取機器人工具,可直接到官網下載http://www.petercorke.com/Robotics_Toolbox.html,幾個月
基於MATLAB機器人工具箱的KUKA youBot機械臂運動學建模——DH法
以實驗室的KUKA youBot五自由度機械臂為切入點,記得當時和實驗室的同學在這上面花費了好長時間,最後也沒搞定,而這又算是基礎中的基礎,不能忽視。DH一般分為標準DH和改進的DH,以John J.Craig的《機器人學導論》來說,它的是Modified D
基於Mathematica的機器人模擬環境(機械臂篇)
目的 本文手把手教你在 Mathematica 科學計算軟體中搭建機器人的模擬環境,具體包括以下內容: 1 匯入機械臂的三維幾何模型 2 正\逆運動學模擬 3 碰撞檢測 4 軌跡規劃 5 正\逆動力學模擬 6
讓機械臂自動進行手眼標定---以Dobot Magician和Realsense為例(附示例程式碼)
你需要看這篇文章嗎? 這篇文章描述的是如何自動化手眼標定(眼在手外,eye-to-hand)過程,以建立機械臂座標系和攝像頭座標系之間的轉換關係。示例的硬體環境是Dobot Magician 機械手、Intel RealSense D415
ROS機器人Diego 1#製作(十四)機械臂的控制---arduino驅動
今天從淘寶上訂購的兩個機械臂終於到貨了,從這篇開始逐步講解ROS機械臂的控制,這兩個機械臂又花掉了800塊,配的MG99R模擬舵機,如果配數字舵機每個機械臂要555元,價格還是有點小貴。機械臂安裝好後如下圖 本來有一塊通過串列埠控制24路舵機控制的模組,但
機器人(機械臂)動力學建模方法(Euler-Lagrange equation)
動力學介紹 機器人動力學明確描述機器人力和運動之間的關係。在機器人設計、機器人運動模擬和動畫以及控制演算法設計中,都需要考慮動力學方程,他是對機器人系統力和運動關係的完整表述。 動力學方程一般有兩種
洛谷P3165 [CQOI2014]排序機械臂
urn spa stdin open point 排序 fread 機械臂 static 題目描述 為了把工廠中高低不等的物品按從低到高排好序,工程師發明了一種排序機械臂。它遵循一個簡單的排序規則,第一次操作找到攝低的物品的位置P1,並把左起第一個至P1間的物品反序;第二次
[bzoj1552][Cerc2007]robotic sort&&[bzoj3506][Cqoi2014]排序機械臂
ace down 網上 while 題意 esp 很難 clu build 非常垃圾的一道平衡樹,結果被日了一天。很難受嗷嗷嗷 首先不得不說網上的題解讓我這個本來就不熟悉平衡樹的彩筆很難受——並不好理解。 還好Sinogi大佬非常的神,一眼就切掉了,而且用更加美妙的解法。
Bzoj3506: [Cqoi2014]排序機械臂
pos putc 規則 ... def 機械 空格 type 排序規則 題面 題目描述 為了把工廠中高低不等的物品按從低到高排好序,工程師發明了一種排序機械臂。它遵循一個簡單的排序規則,第一次操作找到攝低的物品的位置P1,並把左起第一個至P1間的物品反序;第二次找到第二低的
bzoj 3506[Cqoi2014]排序機械臂 - splay
getch pri 排名 getchar pushd ast for clu 序列 3506: [Cqoi2014]排序機械臂 題目描述 為了把工廠中高低不等的物品按從低到高排好序,工程師發明了一種排序機械臂。它遵循一個簡單的排序規則,第一次操作找到高度最低
洛谷P3165 [CQOI2014]排序機械臂【splay】
物體 題目 分享圖片 char s node 如果 反序 splay upd 題目描述 為了把工廠中高低不等的物品按從低到高排好序,工程師發明了一種排序機械臂。它遵循一個簡單的排序規則,第一次操作找到高度最低的物品的位置 $p_1$,並把左起第一個物品至$p_1$間的物品
UR機械臂運動學正逆解方法
不難 詳解 方法 pan 如果 兩個 每次 當前 旋轉矩陣 最近幾個月因為工作接觸到了機械臂的項目,突然對機械臂運動方法產生了興趣,也就是如何控制機械臂的位置和姿態。借用一張網上的圖片,應該是ur5的尺寸。我用到的是ur3機械臂,除了尺寸不一樣,各關節結構和初始位置和ur5
P3165 [CQOI2014]排序機械臂
list 如果 reset tro top lose str sort for 題目描述 為了把工廠中高低不等的物品按從低到高排好序,工程師發明了一種排序機械臂。它遵循一個簡單的排序規則,第一次操作找到高度最低的物品的位置 P1P_1P1? ,並把左起第一個物品至 P
六自由度機械臂控制系統設計與運動學模擬-論文筆記整理
1. 機械臂系統主要包括機械、硬體和軟體、演算法四個部分,到具體設計需要考慮結構設計、控制系統設計、運動學分析、動力學分析、軌跡規劃研究、路徑規劃研究、運動學動力學模擬等部分 2. 如果智慧機器人自己可以通過學習、總結經驗來獲得修改程式的原則,便是高階智慧機器人,也就是第三代機器人。結合深度學習與機器學習的