
ROS 教程之 vision: 攝像頭標定camera calibration
在上一個ROS教程視覺文章中,我們使用usb_cam包讀入併發布了影象訊息,但是影象沒有被標定,因此存在畸變。ROS官方提供了用於單目或者雙目標定的camera_calibration包。這個包是使用opencv裡的張正友標定法,所以如果你有使用opencv標定的經驗,可以直接標定,而不使用官方的程式。
官方也給出了單目的標定教程和雙目視覺的標定教程。本教程基於usb_cam package 讀取影象,然後使用官方例程進行標定。
1.使用usb_cam 讀取影象,launch檔案如下:
<launch> <arg name="device" default="/dev/video0" /> <node name="usb_cam_node" pkg="usb_cam" type="usb_cam_node" output="screen"> <param name="video_device" value="$(arg device)" /> <param name="image_width" value="640" /> <param name="image_height" value="480" /> <param name="framerate" value="30" /> <param name="brightness" value="128" /> <param name="contrast" value="128" /> <param name="saturation " value="70" /> </node> </launch>
2.檢查usb_cam package釋出的訊息:
$ rostopic list-
/usb_cam_node/camera_info /usb_cam_node/image_raw
$ rosrun camera_calibration cameracalibrator.py --size 11x8 --square 0.03 image:=/usb_cam_node/image_raw camera:=/usb_cam_node其中引數size 11x8 注意是字母x,他是棋盤內部角點個數,如下圖所示。square為棋盤正方形邊長,注意剛剛開始標定的時候,CALIBRATE按鈕是灰色的。
4.標定程式使用方法:
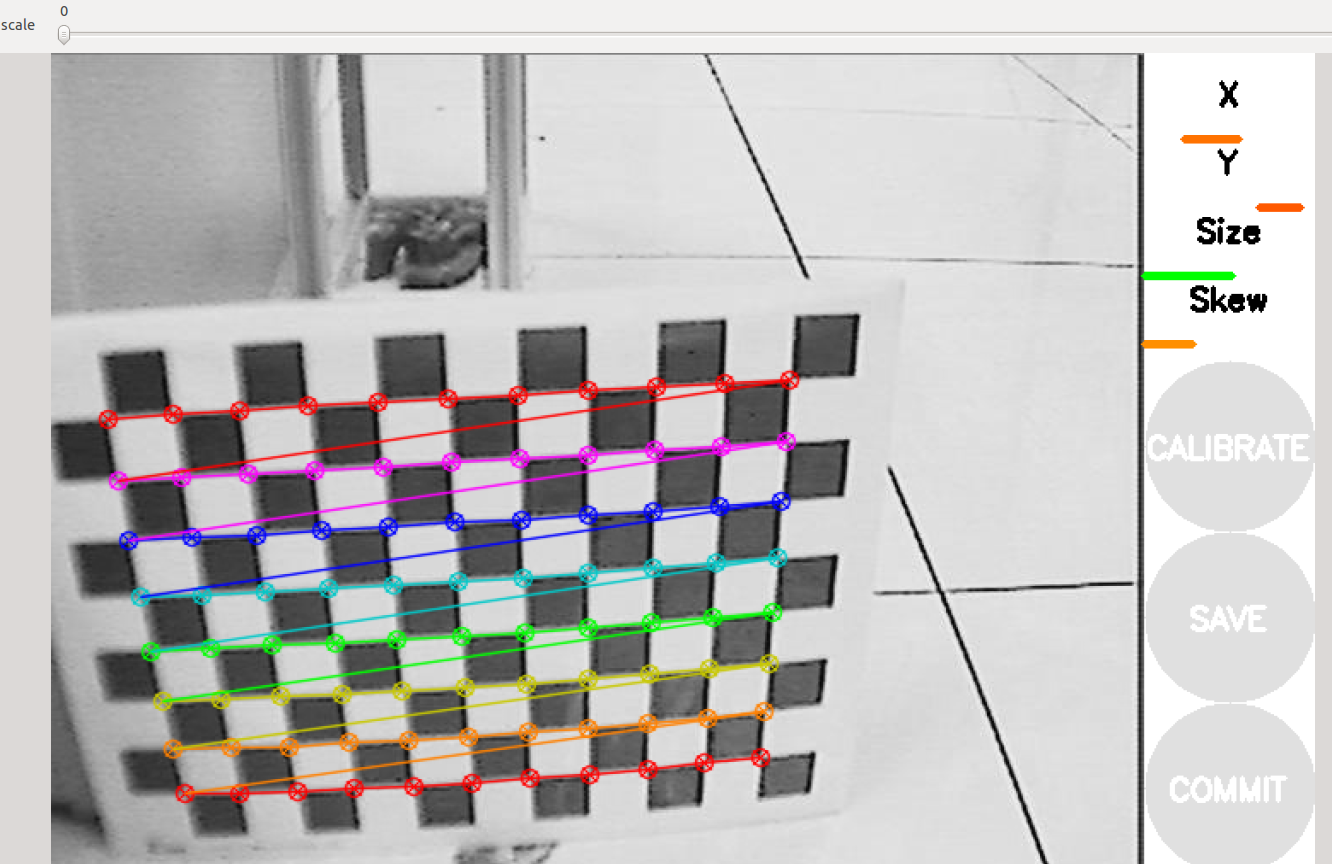
為了得到一個好的標定結果,應該使得標定板儘量出現在攝像頭視野的各個位置裡:
如標定板出現在視野中的左邊,右邊,上邊和下邊,標定板既有傾斜的,也有水平的,。
介面中的x:表示標定板在視野中的左右位置。
y:表示標定板在視野中的上下位置。
size:標定板在佔視野的尺寸大小,也可以理解為標定板離攝像頭的遠近。
skew:標定板在視野中的傾斜位置。

並還要有棋盤佔住大部分視野的圖片
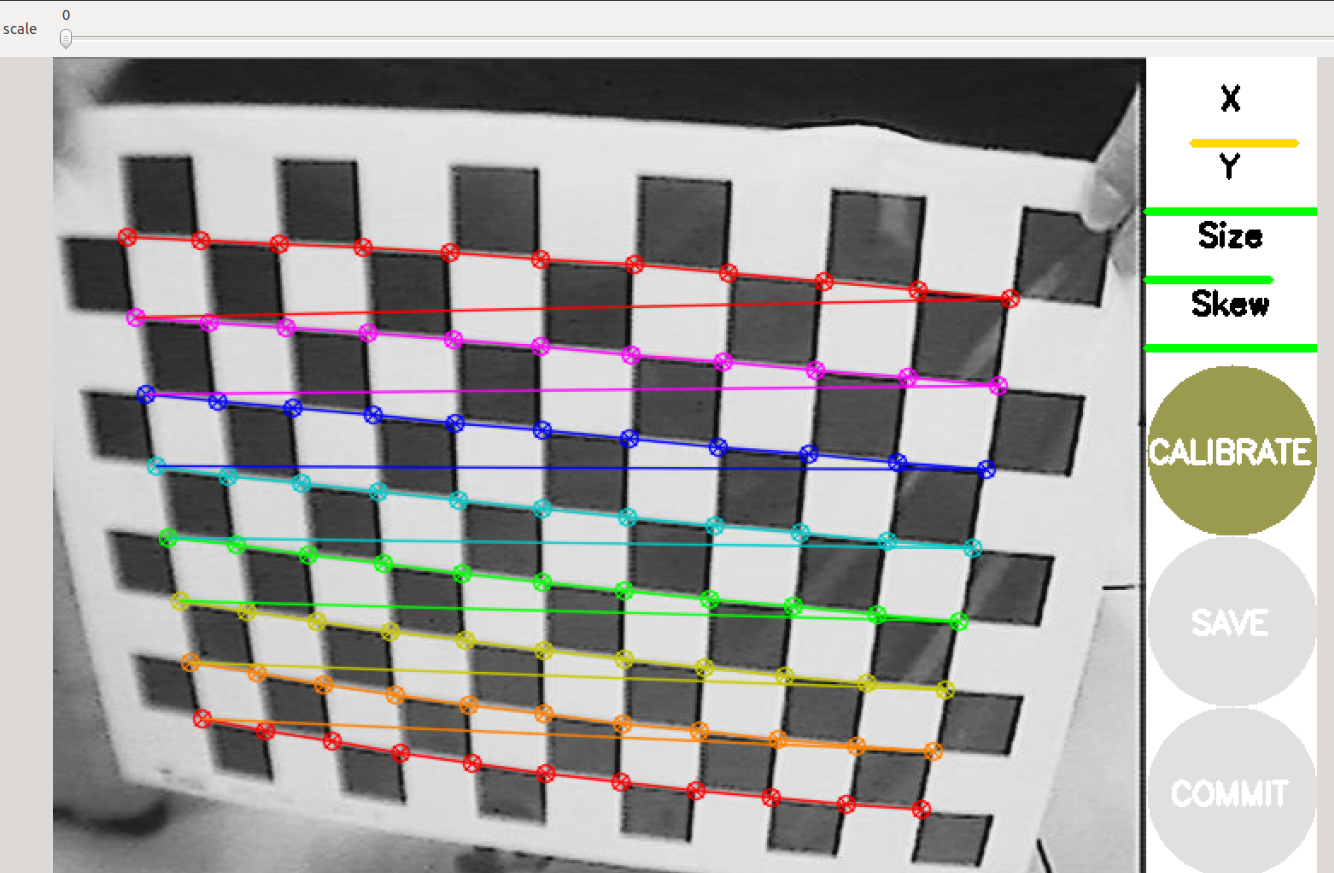
按著上述方式不斷移動標定板,直到CALIBRATE按鈕變亮,點選該按鈕就會進行標定。標定過程將持續一兩分鐘,並且標定介面會變成灰色,無法進行操作,耐心等待即可。
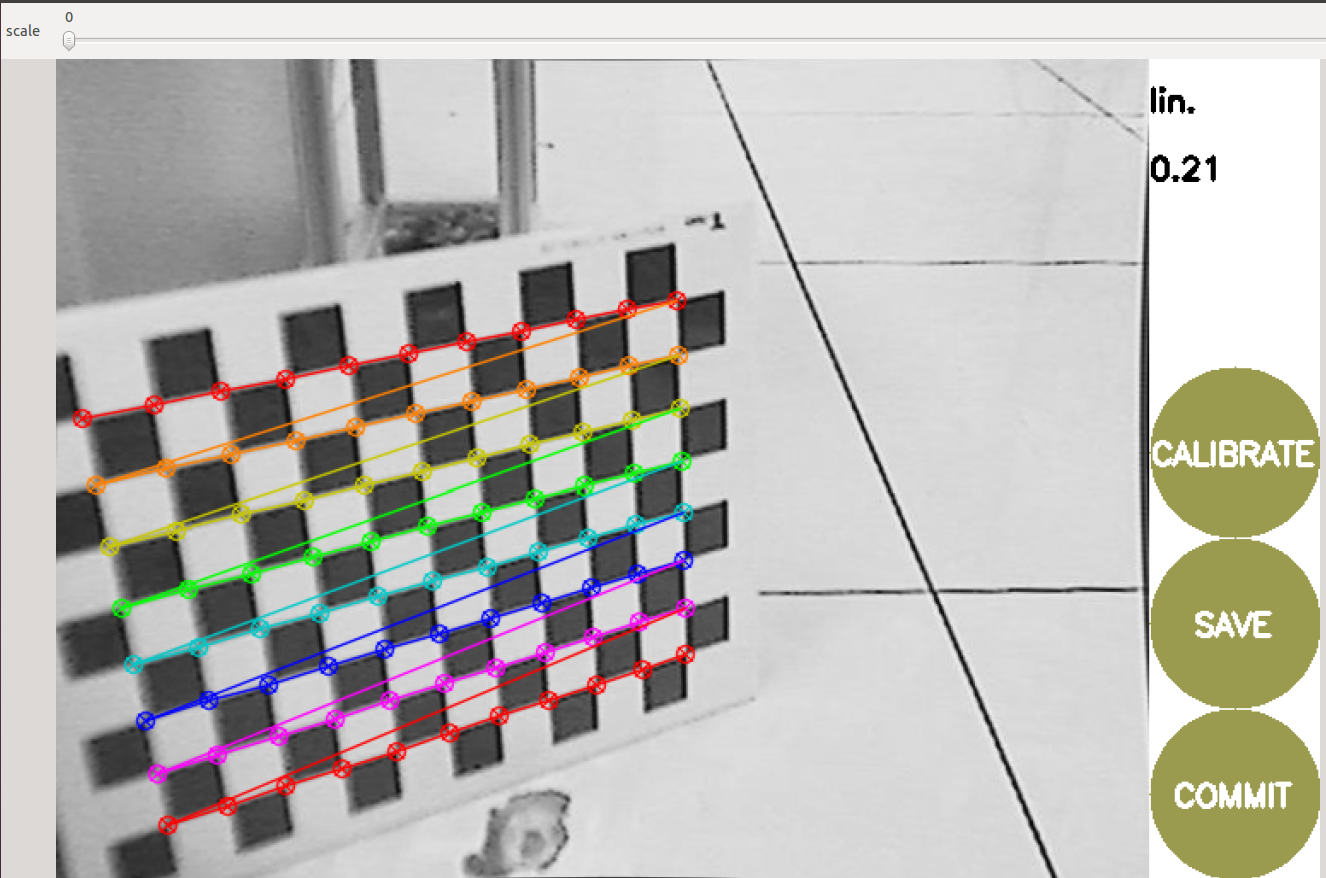
標定完成以後,你將看到如下圖所示的視窗,視窗中的影象為標定後的結果,糾正了畸變。
並且,攝像機的各個引數會出現在標定程式的終端視窗中,如下:
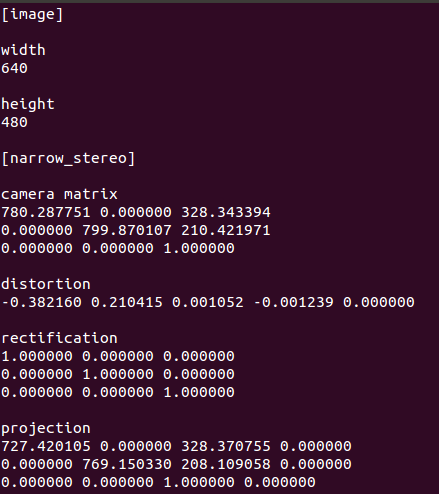
如果對標定結果滿意,點選COMMIT按鈕將結果儲存到預設資料夾,在usb_cam視窗中可以看到如下資訊,說明標定結果已經儲存在相應資料夾下下次啟動usb_cam節點時,會自動呼叫。

reference: