
單目相機標定(Camera Calibration)
阿新 • • 發佈:2018-12-31
為什麼需要相機標定
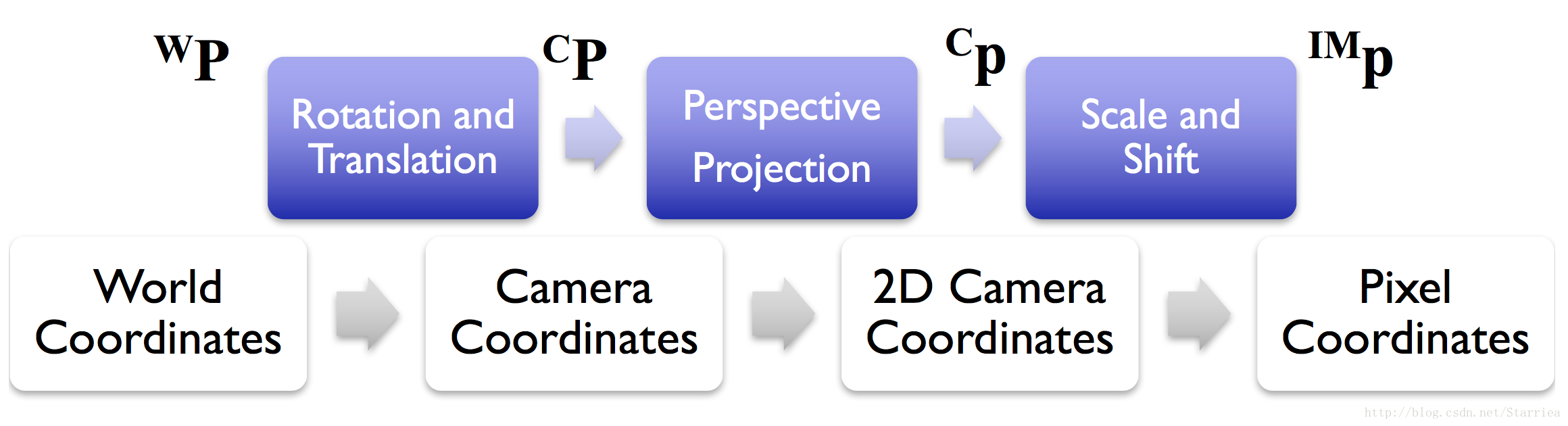
通過image formation pipeline, 我們可以將已知世界座標系上的點對映在畫素座標系上,那麼如何預測影象上的點在3d世界中的位置呢?
第一步便是相機標定。相機標定的工作是消除鏡頭造成的影象變形(distortion)。
世界座標系中的點
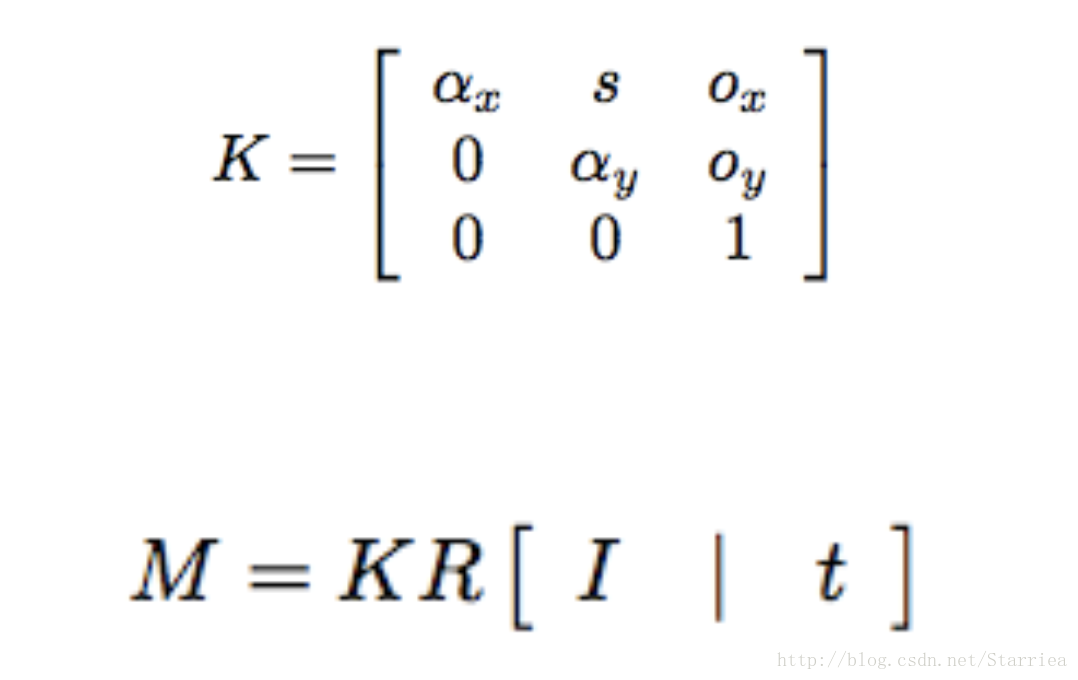
其中
內參數由5個引數組成,分別是:
外引數由兩個部分組成:旋轉矩陣
DLT(direct linear transform)進行相機標定
具體步驟:
- 使用標定板獲得一系列圖片和3d世界中的對應點。
- 利用對應點構造homography等式,求出
M
建成的homography關係式:

提取出未知變數m11, m12….,化成Aq=0形式,q=[m11, m12 …..]^T,A的形式為:

使用svd分解法對A進行分解,便可求出q,也就求出了M。
從M中獲取資訊內外引數K, T
這裡使用的方法是QR分解法。對M進行svd可以求出位移矩陣t,而對M進行QR分解,Q部分為旋轉矩陣的逆(R^-1),R部分為內參數的逆(K^-1)。
python-opencv實現相機標定
使用命令cv2.calibrateCamera()可以直接進行標定。
ret, mtx, dist, rvecs, tvecs = cv2.calibrateCamera(objpoints, imgpoints, gray.shape[::-1],None,None)程式碼範例:
import cv2
import numpy as np
from matplotlib import 程式碼是從我自己的作業裡提出來的,僅作為範例,如有任何問題請私聊我。