
yolov2(yolo9000) 論文理解
本文轉載自:
http://blog.csdn.net/hysteric314/article/details/53909408
目錄
摘要
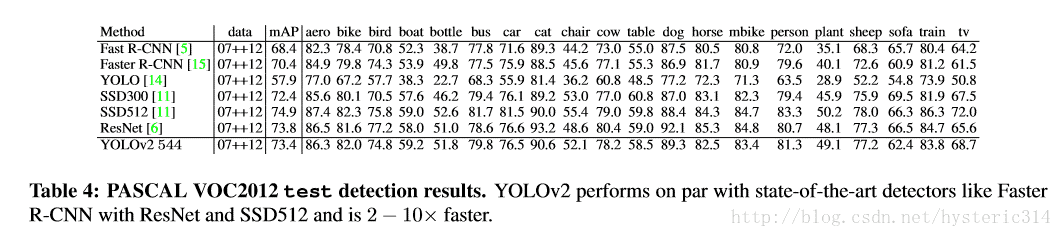
- 提出YOLO v2 :代表著目前業界最先進物體檢測的水平,它的速度要快過其他檢測系統(FasterR-CNN,ResNet,SSD),使用者可以在它的速度與精確度之間進行權衡。
- 提出YOLO9000 :這一網路結構可以實時地檢測超過9000種物體分類,這歸功於它使用了WordTree,通過WordTree來混合檢測資料集與識別資料集之中的資料。
- 提出了一種新的聯合訓練演算法( Joint Training Algorithm ),使用這種聯合訓練技術同時在ImageNet和COCO資料集上進行訓練。YOLO9000進一步縮小了監測資料集與識別資料集之間的代溝。
簡介
目前的檢測資料集(Detection Datasets)有很多限制,分類標籤的資訊太少,圖片的數量小於分類資料集(Classification Datasets),而且檢測資料集的成本太高,使其無法當作分類資料集進行使用。而現在的分類資料集卻有著大量的圖片和十分豐富分類資訊。
文章提出了一種新的訓練方法–聯合訓練演算法。這種演算法可以把這兩種的資料集混合到一起。使用一種分層的觀點對物體進行分類,用巨量的分類資料集資料來擴充檢測資料集,從而把兩種不同的資料集混合起來。
聯合訓練演算法的基本思路就是:同時在檢測資料集和分類資料集上訓練物體檢測器(Object Detectors ),用監測資料集的資料學習物體的準確位置,用分類資料集的資料來增加分類的類別量、提升健壯性。
YOLO9000就是使用聯合訓練演算法訓練出來的,他擁有9000類的分類資訊,這些分類資訊學習自ImageNet分類資料集,而物體位置檢測則學習自COCO檢測資料集。
All of our code and pre-trained models are available online at http://pjreddie.com/yolo9000/
BETTER
YOLO一代有很多缺點,作者希望改進的方向是:改善recall,提升定位的準確度,同時保持分類的準確度。
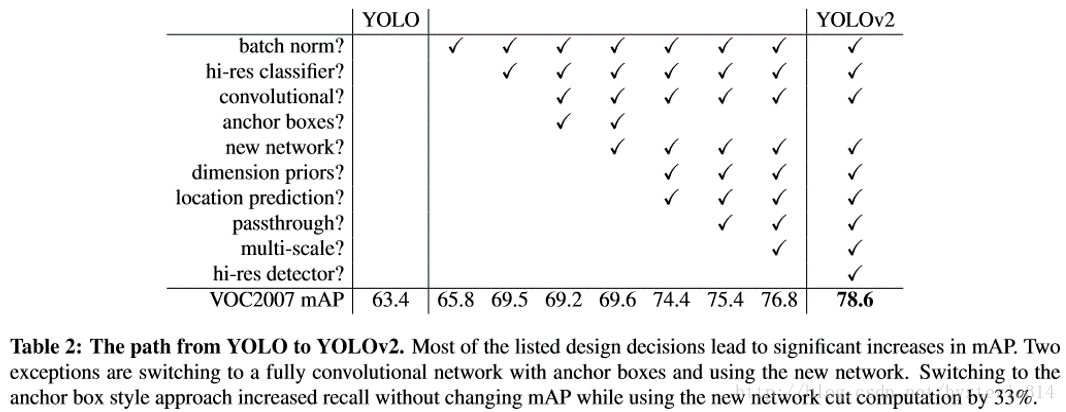
目前計算機視覺的趨勢是更大更深的網路,更好的效能表現通常依賴於訓練更大的網路或者把多種model綜合到一起。但是YOLO v2則著力於簡化網路。具體的改進見下表:
-
Batch Normalization
使用Batch Normalization對網路進行優化,讓網路提高了收斂性,同時還消除了對其他形式的正則化(regularization)的依賴。通過對YOLO的每一個卷積層增加Batch Normalization,最終使得mAP提高了2%,同時還使model正則化。使用Batch Normalization可以從model中去掉Dropout,而不會產生過擬合。
-
High resolution classifier
目前業界標準的檢測方法,都要先把分類器(classifier)放在ImageNet上進行預訓練。從Alexnet開始,大多數的分類器都執行在小於256*256的圖片上。而現在YOLO從224*224增加到了448*448,這就意味著網路需要適應新的輸入解析度。
為了適應新的解析度,YOLO v2的分類網路以448*448的解析度先在ImageNet上進行Fine Tune,Fine Tune10個epochs,讓網路有時間調整他的濾波器(filters),好讓其能更好的執行在新解析度上,還需要調優用於檢測的Resulting Network。最終通過使用高解析度,mAP提升了4%。 -
Convolution with anchor boxes
YOLO一代包含有全連線層,從而能直接預測Bounding Boxes的座標值。 Faster R-CNN的方法只用卷積層與Region Proposal Network來預測Anchor Box的偏移值與置信度,而不是直接預測座標值。作者發現通過預測偏移量而不是座標值能夠簡化問題,讓神經網路學習起來更容易。
所以最終YOLO去掉了全連線層,使用Anchor Boxes來預測 Bounding Boxes。作者去掉了網路中一個Pooling層,這讓卷積層的輸出能有更高的解析度。收縮網路讓其執行在416*416而不是448*448。由於圖片中的物體都傾向於出現在圖片的中心位置,特別是那種比較大的物體,所以有一個單獨位於物體中心的位置用於預測這些物體。YOLO的卷積層採用32這個值來下采樣圖片,所以通過選擇416*416用作輸入尺寸最終能輸出一個13*13的Feature Map。 使用Anchor Box會讓精確度稍微下降,但用了它能讓YOLO能預測出大於一千個框,同時recall達到88%,mAP達到69.2%。 -
Dimension clusters
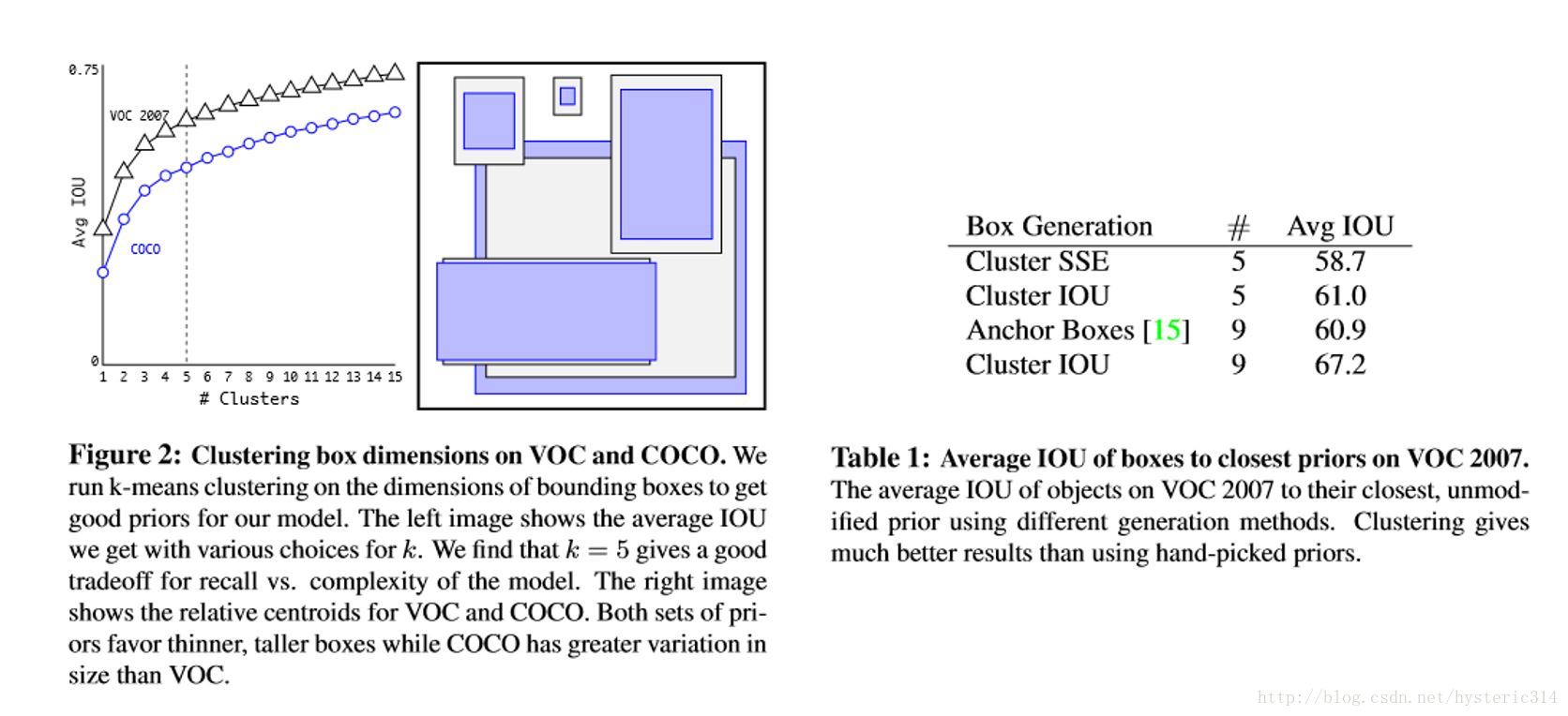
之前Anchor Box的尺寸是手動選擇的,所以尺寸還有優化的餘地。 為了優化,在訓練集(training set)Bounding Boxes上跑了一下k-means聚類,來找到一個比較好的值。
如果我們用標準的歐式距離的k-means,尺寸大的框比小框產生更多的錯誤。因為我們的目的是提高IOU分數,這依賴於Box的大小,所以距離度量的使用:通過分析實驗結果(Figure 2),左圖:在model複雜性與high recall之間權衡之後,選擇聚類分類數K=5。右圖:是聚類的中心,大多數是高瘦的Box。
Table1是說明用K-means選擇Anchor Boxes時,當Cluster IOU選擇值為5時,AVG IOU的值是61,這個值要比不用聚類的方法的60.9要高。選擇值為9的時候,AVG IOU更有顯著提高。總之就是說明用聚類的方法是有效果的。

-
Direct location prediction
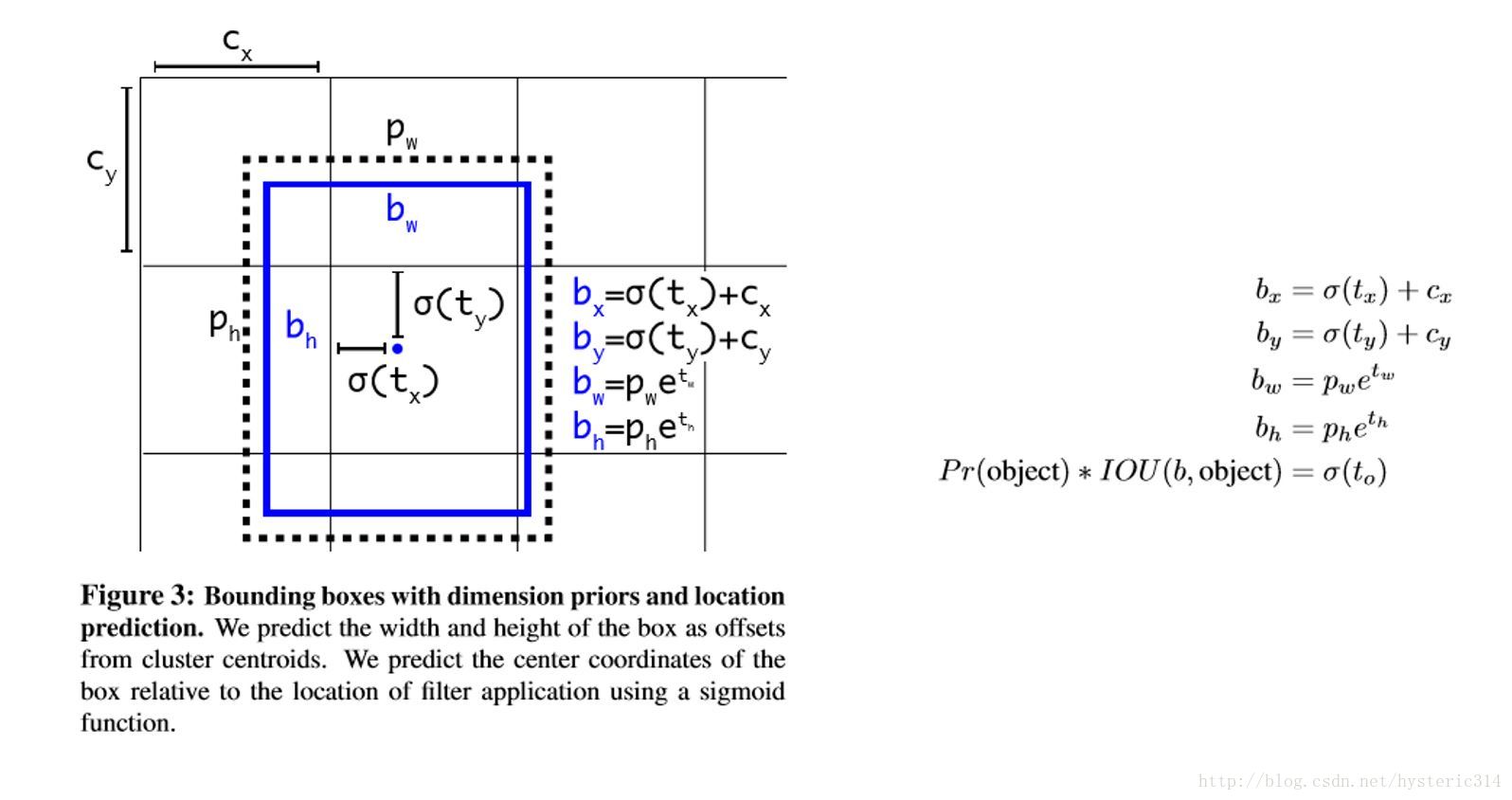
用Anchor Box的方法,會讓model變得不穩定,尤其是在最開始的幾次迭代的時候。大多數不穩定因素產生自預測Box的(x,y)位置的時候。按照之前YOLO的方法,網路不會預測偏移量,而是根據YOLO中的網格單元的位置來預測座標,這就讓Ground Truth的值介於0到1之間。而為了讓網路的結果能落在這一範圍內,網路使用一個 Logistic Activation來對於網路預測結果進行限制,讓結果介於0到1之間。 網路在每一個網格單元中預測出5個Bounding Boxes,每個Bounding Boxes有五個座標值tx,ty,tw,th,t0,他們的關係見下圖(Figure3)。假設一個網格單元對於圖片左上角的偏移量是cx,cy,Bounding Boxes Prior的寬度和高度是pw,ph,那麼預測的結果見下圖右面的公式:
因為使用了限制讓數值變得引數化,也讓網路更容易學習、更穩定。
Dimension clusters和Direct location prediction,improves YOLO by almost 5% over the version with anchor boxes. -
Fine-Grained Features
YOLO修改後的Feature Map大小為13*13,這個尺寸對檢測圖片中尺寸大物體來說足夠了,同時使用這種細粒度的特徵對定位小物體的位置可能也有好處。Faster F-CNN、SSD都使用不同尺寸的Feature Map來取得不同範圍的解析度,而YOLO採取了不同的方法,YOLO加上了一個Passthrough Layer來取得之前的某個26*26解析度的層的特徵。這個Passthrough layer能夠把高解析度特徵與低解析度特徵聯絡在一起,聯絡起來的方法是把相鄰的特徵堆積在不同的Channel之中,這一方法類似與Resnet的Identity Mapping,從而把26*26*512變成13*13*2048。YOLO中的檢測器位於擴充套件後(expanded )的Feature Map的上方,所以他能取得細粒度的特徵資訊,這提升了YOLO 1%的效能。
-
Multi-ScaleTraining
作者希望YOLO v2能健壯的運行於不同尺寸的圖片之上,所以把這一想法用於訓練model中。
區別於之前的補全圖片的尺寸的方法,YOLO v2每迭代幾次都會改變網路引數。每10個Batch,網路會隨機地選擇一個新的圖片尺寸,由於使用了下采樣引數是32,所以不同的尺寸大小也選擇為32的倍數{320,352…..608},最小320*320,最大608*608,網路會自動改變尺寸,並繼續訓練的過程。
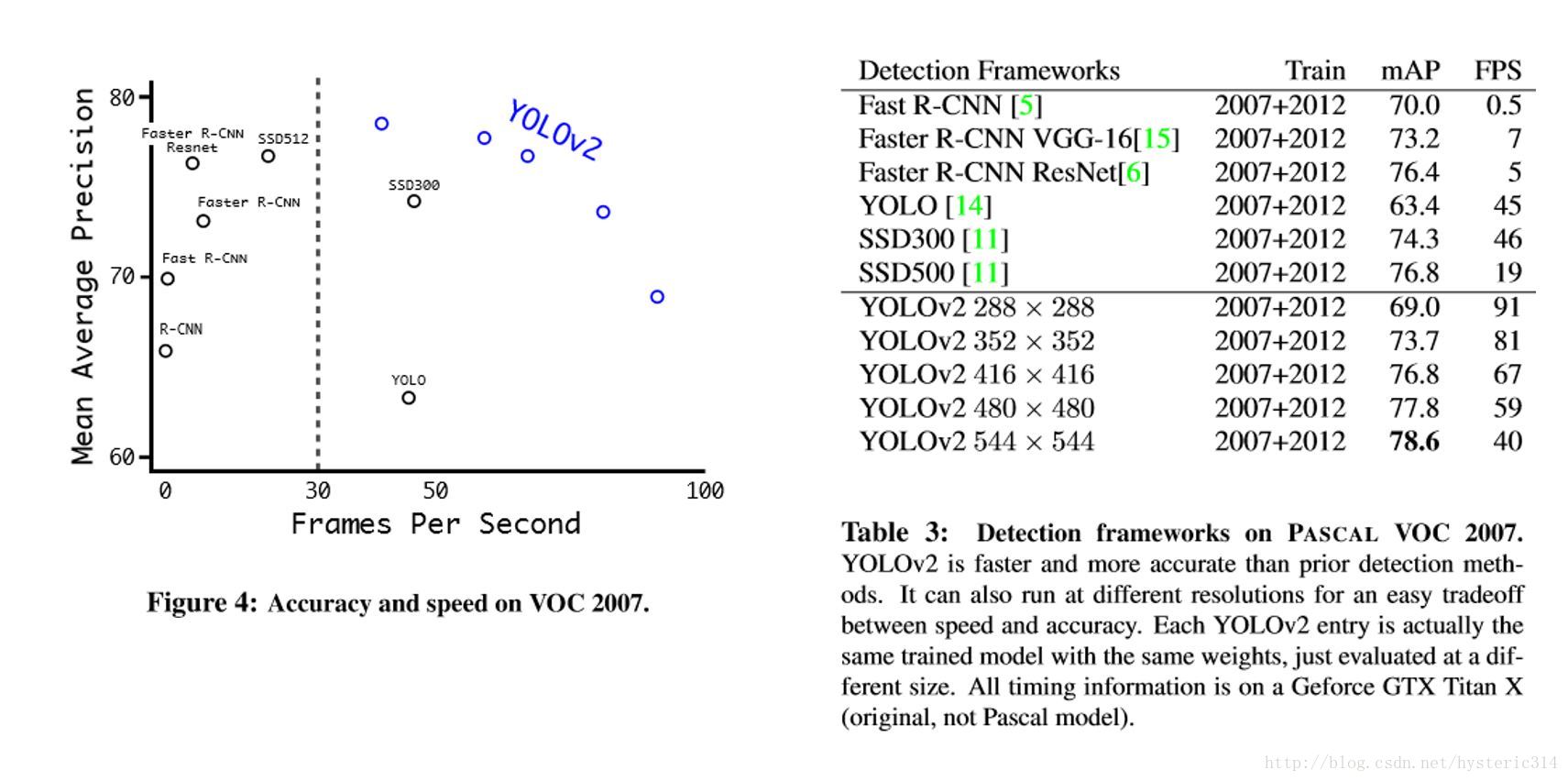
這一政策讓網路在不同的輸入尺寸上都能達到一個很好的預測效果,同一網路能在不同解析度上進行檢測。當輸入圖片尺寸比較小的時候跑的比較快,輸入圖片尺寸比較大的時候精度高,所以你可以在YOLO v2的速度和精度上進行權衡。
Figure4,Table 3:在voc2007上的速度與精度 -
Further Experiments
Faster
YOLO使用的是Googlelent架構,比VGG-16快,YOLO完成一次前向過程只用8.52 billion 運算,而VGG-16要30.69billion,但是YOLO精度稍低於VGG-16。
-
Draknet19
YOLO v2基於一個新的分類model,有點類似與VGG。YOLO v2使用3*3filter,每次Pooling之後都增加一倍Channels的數量。YOLO v2使用全域性平均Pooling,使用Batch Normilazation來讓訓練更穩定,加速收斂,使model規範化。
最終的model–Darknet19,有19個卷積層和5個maxpooling層,處理一張圖片只需要5.58 billion次運算,在ImageNet上達到72.9%top-1精確度,91.2%top-5精確度。 -
Training for classification
網路訓練在 ImageNet 1000類分類資料集,訓練了160epochs,使用隨機梯度下降,初始學習率為0.1, polynomial
rate decay with a power of 4, weight decay of 0.0005 and momentum of 0.9 。訓練期間使用標準的資料擴大方法:隨機裁剪、旋轉、變換顏色(hue)、變換飽和度(saturation), 變換曝光度(exposure shifts)。
在訓練時,把整個網路在更大的448*448解析度上Fine Turnning 10個 epoches,初始學習率設定為0.001,這種網路達到達到76.5%top-1精確度,93.3%top-5精確度。 -
Training for detection
網路去掉了最後一個卷積層,而加上了三個3*3卷積層,每個卷積層有1024個Filters,每個卷積層緊接著一個1*1卷積層, with
the number of outputs we need for detection。
對於VOC資料,網路預測出每個網格單元預測五個Bounding Boxes,每個Bounding Boxes預測5個座標和20類,所以一共125個Filters,增加了Passthough層來獲取前面層的細粒度資訊,網路訓練了160epoches,初始學習率0.001,dividing it by 10 at 60 and 90 epochs,a weight decay of 0.0005 and momentum of 0.9,資料擴大方法相同,對COCO與VOC資料集的訓練對策相同。
Stronger
在訓練的過程中,當網路遇到一個來自檢測資料集的圖片與標記資訊,那麼就把這些資料用完整的YOLO v2 loss功能反向傳播這個圖片。當網路遇到一個來自分類資料集的圖片和分類標記資訊,只用整個結構中分類部分的loss功能反向傳播這個圖片。
但是檢測資料集只有粗粒度的標記資訊,像“貓“、“ 狗”之類,而分類資料集的標籤資訊則更細粒度,更豐富。比如狗這一類就包括”哈士奇“”牛頭梗“”金毛狗“等等。所以如果想同時在監測資料集與分類資料集上進行訓練,那麼就要用一種一致性的方法融合這些標籤資訊。
再者,用於分類的方法,大多是用softmax layer方法,softmax意味著分類的類別之間要互相獨立的。而盲目地混合資料集訓練,就會出現比如:檢測資料集的分類資訊中”狗“這一分類,在分類資料集合中,就會有的不同種類的狗”哈士奇“”牛頭梗“”金毛“這些分類,這兩種資料集之間的分類資訊不相互獨立。所以使用一種多標籤的model來混合資料集,假設一個圖片可以有多個分類資訊,並假定分類資訊必須是相互獨立的規則可以被忽略。
-
Hierarchical classification
WordNet的結構是一個直接圖表(directed graph),而不是樹型結構。因為語言是複雜的,狗這個詞既屬於‘犬科’又屬於‘家畜’兩類,而‘犬科’和‘家畜’兩類在wordnet中則是同義詞,所以不能用樹形結構。
作者希望根據ImageNet中包含的概念來建立一個分層樹,為了建立這個分層樹,首先檢查ImagenNet中出現的名詞,再在WordNet中找到這些名詞,再找到這些名詞到達他們根節點的路徑(在這裡設為所有的根節點為實體物件(physical object))。在WordNet中,大多數同義詞只有一個路徑,所以首先把這條路徑中的詞全部都加到分層樹中。接著迭代地檢查剩下的名詞,並儘可能少的把他們新增到分層樹上,新增的原則是取最短路徑加入到樹中。
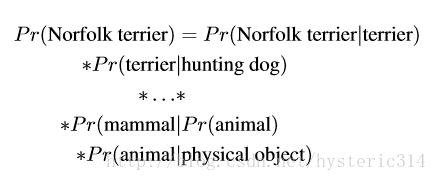
為了計算某一結點的絕對概率,只需要對這一結點到根節點的整條路徑的所有概率進行相乘。所以比如你想知道一個圖片是否是Norfolk terrier的概率,則進行如下計算:為了驗證這一個方法,在WordTree上訓練Darknet19的model,使用1000類的ImageNet進行訓練,為了建立WordtTree 1K,把所有中間詞彙加入到WordTree上,把標籤空間從1000擴大到了1369。在訓練過程中,如果有一個圖片的標籤是”Norfolk terrier“,那麼這個圖片還會獲得”狗“(dog)以及“哺乳動物”(mammal)等標籤。總之現在一張圖片是多標記的,標記之間不需要相互獨立。
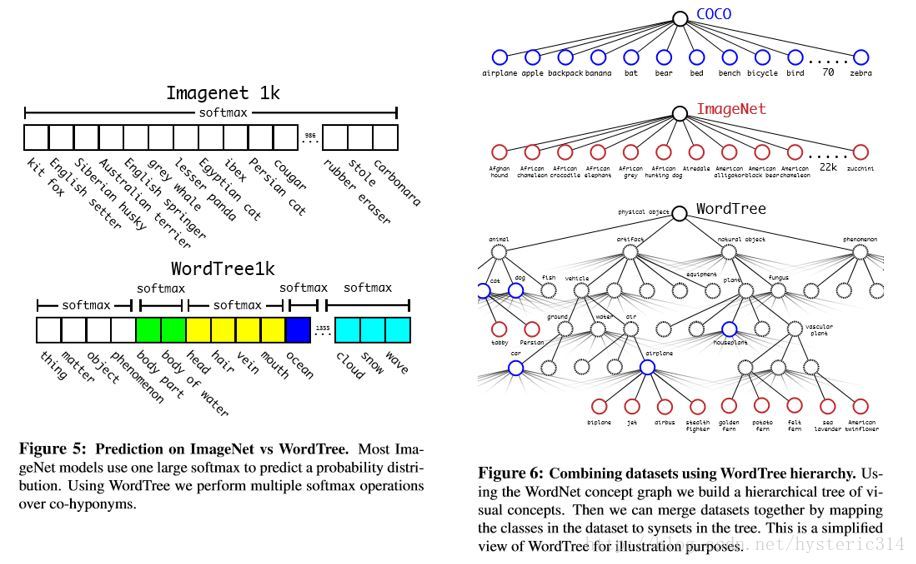
如Figure5所示,之前的ImageNet分類是使用一個大softmax進行分類。而現在,WordTree只需要對同一概念下的同義詞進行softmax分類。
使用相同的訓練引數,這種分層結構的Darknet19達到71.9%top-1精度和90.4%top-5精確度,精度只有微小的下降。
這種方法的好處:在對未知或者新的物體進行分類時,效能降低的很優雅(gracefully)。比如看到一個狗的照片,但不知道是哪種種類的狗,那麼就高置信度(confidence)預測是”狗“,而其他狗的種類的同義詞如”哈士奇“”牛頭梗“”金毛“等這些則低置信度。 -
Datasets combination with wordtree
用WordTree 把資料集合中的類別對映到分層樹中的同義詞上,例如上圖Figure 6,WordTree混合ImageNet與COCO。
-
Joint classification and detection
作者的目的是:訓練一個Extremely Large Scale檢測器。所以訓練的時候使用WordTree混合了COCO檢測資料集與ImageNet中的Top9000類,混合後的資料集對應的WordTree有9418個類。另一方面,由於ImageNet資料集太大了,作者為了平衡一下兩個資料集之間的資料量,通過過取樣(oversampling)COCO資料集中的資料,使COCO資料集與ImageNet資料集之間的資料量比例達到1:4。
YOLO9000的訓練基於YOLO v2的構架,但是使用3priors而不是5來限制輸出的大小。當網路遇到檢測資料集中的圖片時則正常地反方向傳播,當遇到分類資料集圖片的時候,只使用分類的loss功能進行反向傳播。同時作者假設IOU最少為 .3。最後根據這些假設進行反向傳播。使用聯合訓練法,YOLO9000使用COCO檢測資料集學習檢測圖片中的物體的位置,使用ImageNet分類資料集學習如何從大量的類別中進行分類。
為了評估這一方法,使用ImageNet Detection Task對訓練結果進行評估。
評估結果:
YOLO9000取得19.7mAP。
在未學習過的156個分類資料上進行測試,mAP達到16.0。
YOLO9000的mAP比DPM高,而且YOLO有更多先進的特徵,YOLO9000是用部分監督的方式在不同訓練集上進行訓練,同時還能檢測9000個物體類別,並保證實時執行。
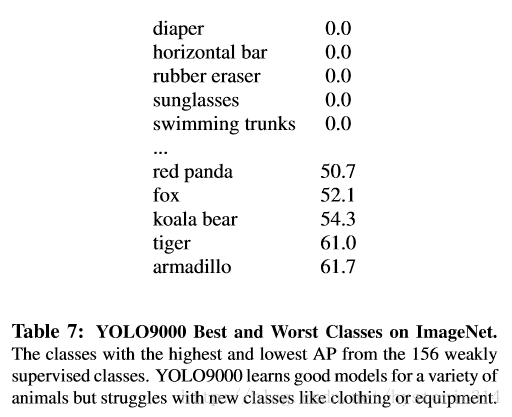
雖然YOLO9000對動物的識別效能很好,但是對類別為”sungalsses“或者”swimming trunks“這些衣服或者裝備的類別,它的識別效能不是很好,見table 7。這跟資料集的資料組成有很大關係。
總結
YOLO v2 代表著目前最先進物體檢測的水平,在多種監測資料集中都要快過其他檢測系統,並可以在速度與精確度上進行權衡。
YOLO 9000 的網路結構允許實時地檢測超過9000種物體分類,這歸功於它能同時優化檢測與分類功能。使用WordTree來混合來自不同的資源的訓練資料,並使用聯合優化技術同時在ImageNet和COCO資料集上進行訓練,YOLO9000進一步縮小了監測資料集與識別資料集之間的大小代溝。
文章還提出了WordTree,資料集混合訓練,多尺寸訓練等全新的訓練方法。