
3 廣義逆矩陣
3. 廣義逆矩陣
3.1 定義
廣義逆
Am×n,Xm×n ,若X滿足moore-penrose條件- AXA=A
- XAX=X
(AX)H=AX (XA)H=XA
中的一部分,稱X是A的廣義逆矩陣, 簡稱廣義逆
偽逆
A+ - 如果X滿足上述所有moore-penrose條件,則稱X是A的偽逆,或加號逆(M-P逆),記為
A+ , 若A可逆,則A−1=A+ 。 ∀An×n∈C,A+ 存在且唯一。- 性質
AA+A=A A+AA+=A+ (AA+)H=AA+ (A+A)H=A+A
- 如果X滿足上述所有moore-penrose條件,則稱X是A的偽逆,或加號逆(M-P逆),記為
偽逆的運算
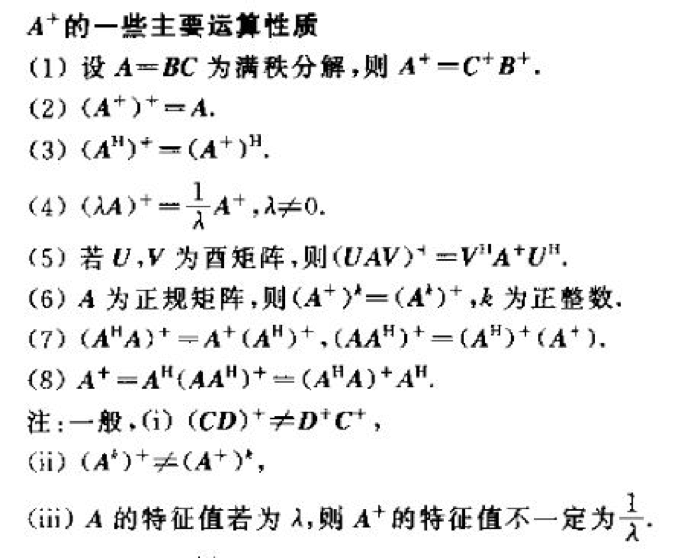
設An×n∈C ,則- 偽逆的偽逆是自己,
(A+)+=A - 共軛轉置的偽逆=偽逆的共軛轉置,
(AH)+= (A+)H - 轉置的偽逆=偽逆的轉置,
(AT)+=(A+)T (AHA)+=A+(AH)+,(AAH)+=(AH)+A+ - 一般的偽逆不能去括號,
(AB)+≠B+A+ - 一般地,A乘A的偽逆不等於單位陣,
A+A≠AA+≠I - 偽逆的秩=本身的秩,
r(A+)=r(A) A+=(AHA)+AH=AH(AAH)+ - 偽逆的像空間=共軛轉置的像空間
R(A+)=R(AH) - 偽逆的核空間=共軛轉置的核空間
N(A+)=N(AH)
- 偽逆的偽逆是自己,
A的{n}逆
滿足第n個moore-pensore條件的廣義逆叫做A的{n}逆,記作A(n), n=1,2,3,4,如:- 滿足第1個mp條件為A的{1}逆,可寫作A(1),常記作
A ,也叫A的減號逆− - 滿足第2,3個mp條件的為A的{2,3}逆,可寫作A(2,3)
以上均是A的廣義逆
- 滿足第1個mp條件為A的{1}逆,可寫作A(1),常記作
3.2 偽逆A+ 的求法
滿秩分解求A+
對於Arm×n , r > 0, A有滿秩分解A=Fm×rGr×n (列滿秩×行滿秩),則
A+=GH(GGH)−1(FHF)−1FH=GH( 相關推薦
3 廣義逆矩陣
3. 廣義逆矩陣 3.1 定義 廣義逆 Am×n,Xm×n,若X滿足moore-penrose條件 AXA=A XAX=X (AX)H=AX (XA)H=XA 中的一部分,稱X是A的廣義
矩陣論筆記(十)——廣義逆矩陣
當 A 滿秩時,方程 Ax=b 的解為 x=A−1b。但當 A 不滿秩,甚至方程 Ax=b 無解時,我們也希望用某種逆 A† 的形式表示方程的(近似)解 x=A†b。這便是廣義逆的作用。 0 投影變換與投影矩陣 投影矩陣的求法: (1)M→M:P{L,
Eigen矩陣庫中非方陣的廣義逆矩陣的求法,利用SVD矩陣分解
X=A+(廣義逆) 直接上C++程式碼: Eigen::MatrixXd MainWindow::pinv(Eigen::MatrixXd A) { Eigen::JacobiSVD<Eigen::MatrixXd> svd(A,
矩陣論學習筆記六:廣義逆矩陣
參考書:《矩陣論》第3版,程雲鵬 張凱院 徐仲編著 西北工業大學出版社 廣義逆矩陣:該矩陣對於奇異矩陣甚至長方矩陣都存在、具有通常逆矩陣的一些性質、當矩陣非奇異時,它還原到通常的逆矩陣,滿足以上3條性質的矩陣叫做廣義逆矩陣 1920年,E.H.Moore提出廣義逆矩陣的概念
矩陣乘法和逆矩陣-線性代數課時3(MIT Linear Algebra , Gilbert Strang)
這是Strang教授的第三講,講解的內容是矩陣乘法和矩陣的逆。矩陣乘法在前面已經使用過,本節課教授只是集中細緻的講解矩陣乘法滿足的定律和幾種計算矩陣乘法的方法,矩陣的逆是本節課的重要內容。 矩陣乘法 首先介紹矩陣運算的條件和滿足的運算規律,
2015年大二上-資料結構-陣列與廣義表(2)-3.上三角矩陣的壓縮儲存及基本運算
/* *Copyright (c) 2014,煙臺大學計算機學院 *All rights reserved. *檔名稱:Annpion.cpp *作者:王耀鵬 *完成日期:2015年12月16日 *版本號:v1.0 * *問題描述:上三角矩陣的壓縮儲存及基本運算 *輸入描述
Moore-Penrose廣義逆:可解決MATLAB報錯“矩陣接近奇異值,或者縮放錯誤。結果可能不準確”
但實際上執行過程中我們會遇到:當AX=b線性方程組是一個病態方程組;或者A是奇異矩陣(即det(A)=0,不可逆),沒法求逆,用不了inv(A)方法只能用A\b,此時MATLAB會報錯“矩陣接近奇異值,或者縮放錯誤。結果可能不準確”…網路上很多人問這個問題怎麼解決,其實不
&1.3、乘法與逆矩陣
家裏 和我 有意 ref 爸爸 同學 影響 文化 href pdf與html筆記鏈接(Google雲盤) 多年父子成兄弟 汪曾祺 這是我父親的一句名言。 父親是個絕頂聰明的人。他是畫家,會刻圖章,畫寫意花卉。圖章初宗浙派,中年後治漢印。他會擺弄各種樂器,
哪些矩陣存在逆矩陣?
逆矩陣 矩陣 bsp tlab 什麽 != 命題 方程 lock 逆矩陣定義: 設A為n階方陣,若存在n階方陣B,使得 AB=BA=I 則稱A是可逆矩陣,簡稱A可逆,並稱B是A的逆矩陣,記為A-1=B 註意,從定義就可以看出,只有方陣可能存在逆矩陣,非方陣不存在逆矩陣(
POJ 3233-Matrix Power Series( S = A + A^2 + A^3 + … + A^k 矩陣快速冪取模)
spa nta plm lines case arch lang stream 矩陣 Matrix Power Series Time Limit: 3000MS Memory Limit: 131072K Total Submissions: 20309
9.兩個 3 行 3 列的矩陣,實現其對應位置的數據相加,並返回一個新矩陣
int nco utf print odin enc odi nbsp bsp X = [[12,7,3], [4 ,5,6], [7 ,8,9]] Y = [[5,8,1], [6,7,3], [4,5,9]] #encoding=
線性代數筆記8——求解逆矩陣
掃描 tro 二維矩陣 ont 計算 技術 一起 get rda 在第一章中介紹了逆矩陣與奇異矩陣,我們可以通過一個行列式公式計算二維矩陣的逆,那麽更多維矩陣的逆如何求解呢? 逆矩陣與方程組 或許用行列式求逆矩陣的做法有些公式化,實際上可以將求逆矩陣看成解方程組:
golang 矩陣乘法、行列式、求逆矩陣
urn imp lang type 定義 ack 列數 return float package matrix import ( "math" "github.com/astaxie/beego" ) type Matrix4 struct {
求二階逆矩陣
printf ++ pri -a main 二階 put turn scan 給定的二階矩陣(2*2),求其逆矩陣。 輸入 輸入大小為2*2的距陣。 輸出 輸出一個大小為2*2的距陣,矩陣每一行相鄰的的兩個數字之間由一個空格隔開。具體的請詳見 Sampl
怎樣理解逆矩陣
a/b(當b不為0的時候有意義);同理你理解逆矩陣就是與矩陣成導數關係。 那麼行列式的值不為0,就說明逆矩陣存在,這樣就合情合理了。 首先,我們先來看看這個數的倒數: ·倒數 其實矩陣的逆矩陣也跟倒數的性質一樣,不過只是我們習慣用A-1表
轉置矩陣,對稱矩陣,反對稱矩陣,正交矩陣,行階梯形矩陣,逆矩陣,伴隨矩陣
轉置矩陣: 將矩陣的行列互換得到的新矩陣稱為轉置矩陣,轉置矩陣的行列式不變。 例如, , 。 如果 階方陣和它的轉置相等 ,即 ,則稱矩陣 為對稱矩陣。 如果
線性代數之——矩陣乘法和逆矩陣
1. 矩陣乘法 如果矩陣 \(B\) 的列為 \(b_1, b_2, b_3\),那麼 \(EB\) 的列就是 \(Eb_1, Eb_2, Eb_3\)。 \[\boldsymbol{EB = E[b_1 \quad b_2 \quad b_3] = [Eb_1 \quad Eb_2 \quad Eb_3
第四節、逆矩陣與轉置矩陣
http://www.cnblogs.com/Dumblidor/p/5760606.html 一、關於逆元 (這裡看不懂可以跳過) 在群論中有“逆元”這一概念。 提到逆元就要提到另一個概念:單位元(么元,Identity)。 我們依次來介紹,簡單來說,設G是一個
線代--求逆矩陣
首先公式是醬紫的 若|A|≠0(保證矩陣A可逆),則有 = 其中|A|為方陣的行列式,即由n階方陣A的元素所構成的行列式(各元素的位置不變喲) 為矩陣的伴隨矩陣,即由行列式|A|的各元素的代數餘子式所構成的矩陣 二階三步走:①主對角線交換位置②副對角線添負號③除以行列式的值
C++設計矩陣,實現矩陣相乘和求逆矩陣
矩陣變換是機器人學的基礎,所以Jungle把這一節內容劃分到“工業機器人”欄目。這一節Jungle用C++設計了矩陣的類Matrix,並設計了3個方法: 矩陣相加add 矩陣相乘multiply 求矩陣的逆矩陣inverse 有了這三個方法,足以進行機器人正逆運動