
【目標跟蹤】KCF高速跟蹤詳解
Henriques, João F., et al. “High-speed tracking with kernelized
correlation filters.” Pattern Analysis and Machine Intelligence, IEEE
Transactions on 37.3 (2015): 583-596.
本文的跟蹤方法效果甚好,速度奇高,思想和實現均十分簡潔。其中利用迴圈矩陣進行快速計算的方法尤其值得學習。另外,作者在主頁上十分慷慨地給出了各種語言的實現程式碼。
本文詳細推導論文中的一系列步驟,包括論文中未能闡明的部分。請務必先參看這篇簡介迴圈矩陣性質的
思想
一般化的跟蹤問題可以分解成如下幾步:
1. 在
2. 在
3. 響應最強的取樣作為本幀位置
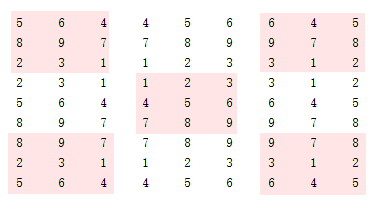
迴圈矩陣表示影象塊
在影象中,迴圈位移操作可以用來近似取樣視窗的位移。
訓練時,圍繞著當前位置進行的一系列位移取樣可以用二維分塊迴圈矩陣
這樣的
線性迴歸訓練提速
此部分頻繁用到了迴圈矩陣的各類性質,請參看這篇部落格。
線性迴歸的最小二乘方法解為:
根據迴圈矩陣乘法性質,
根據迴圈矩陣求逆性質,可以把矩陣求逆轉換為特徵值求逆。
利用
分號表示用1進行對位相除。
反用對角化性質:
利用迴圈矩陣卷積性質