
計算幾何問題彙總--圓與矩形
我在上一篇部落格中(詳見:計算幾何問題彙總–點與線的位置關係)談到了計算幾何最基本的問題:解決點與線(線段or直線)的位置關係判斷。那麼,更進一步,還需要探討複雜一點的情況:比如面與線,面與面之間的關係。本文中,我就先說說最常見的兩種幾何圖形:圓與矩形。我將就矩形與圓的碰撞判斷問題、線與矩形、線與圓之間的碰撞問題作出分析,以及給出這些解決問題的演算法、程式碼。
在此之前,我預設所有對本文內容感興趣的讀者,都瞭解基本的計算幾何概念,並且對我的上一篇部落格:計算幾何問題彙總–點與線的位置關係 所講的內容基本熟悉。因為本文涉及的演算法,幾乎全部都用到了上一篇部落格中所定義的類和函式。
簡單將上一篇部落格的內容陳列如下,方便讀者閱讀後面本文的演算法:
模組名:PointLine
class Point: 點類,兩個屬性,分別是橫縱座標x, y
class Segment: 線段類,兩個屬性,分別是兩個端點p1, p2
class Line: 直線類,兩個屬性,分別是直線上任意兩點p1, p2
class Vector: 向量類,以向量的起點和終點為引數,建立一個由橫縱座標為兩個屬性的類
func: pointDistance(p1, p2): 計算兩點之間距離的函式。返回一個浮點型的值
func: pointToLine(C, AB): 計算點C到直線AB的距離。返回一個浮點型的值
func: pointInLine(C 好了,以上是我在上一篇部落格中定義的類和函式,我把他們的基本功能,引數設定等等簡要列在了上面,以便理解本文後面將要給出的程式碼。至於具體的演算法及分析,請翻看我的上一篇部落格。
需要注意的是,我在本文中,把上一篇部落格的工作全部封裝成了一個模組:PointLine.py,方便本文的程式碼呼叫。
接下來,就進入本文的主題吧。
圓
1. 圓與點的位置關係
簡單來分,二維空間內,圓與點的位置關係,只有兩種:
(1)點在圓上(包括在圓周上以及在圓內);
(2)點在圓外
而判斷的方法很直接,計算點到圓心的距離,再用這個距離和圓的半徑比較即可。
先定義一個圓類:兩個屬性,圓心及半徑。
class Circle(object):
"""Circle has 2 attributes: center and radius"""
def __init__(self, center, radius):
self.center = center
self.radius = radius然後寫出判斷點與圓關係的完整程式碼如下:
from PointLine import *
class Circle(object):
"""Circle has 2 attributes: center and radius"""
def __init__(self, center, radius):
self.center = center
self.radius = radius
def pointInCircle(point, circle):
"""determine whether a point in a circle"""
return (pointDistance(point, circle.center) - circle.radius) < 1e-9其中,pointDistance() 函式在模組 PointLine 已經存在。
最後的距離判斷還是要滿足浮點值比較的原則,上一篇部落格中詳細說過,不再贅述。
2. 圓與線的位置關係
(1) 圓與直線的位置關係
簡單劃分,還是兩種:相交(包括相切);不相交
判斷的依據是根據圓心到直線的距離與圓半徑相比較。判別函式如下:
def lineIntersectsCircle(line, circle):
"""determine whether a line intersects a circle"""
dis = pointToLine(circle.center, line)
return dis - circle.radius < 1e-9其中,pointToLine() 在模組PointLine中已經存在。
(2) 圓與線段的位置關係
線段由於其位置上的限制,導致我們在判斷線段和圓的關係的時候會麻煩一點。判斷思路如下:
- 判斷線段
s 所在的直線l 與圓心的距離dis 和圓的半徑r 之間的關係。若dis<=r 則進行2、3步的判斷;若dis>r ,直接返回False.(也就是說肯定與圓不相交) - 計算出圓心到直線
l 的垂線與直線l 的交點(也就是垂足),記為點D . 此處的計算方法參考我在上一篇部落格中計算點到直線距離時,所使用的向量法。(詳見:計算幾何問題彙總–點與線的位置關係) - 判斷點
D 是否線上段s 上,判斷方法是PointLine模組中的函式PointInSegment()。 這裡直接呼叫就行。
程式碼如下:
def segmentIntersectsCircle(AB, circle):
"""determine whether a segment intersects a circle"""
if not lineIntersectsCircle(Line(AB.p1, AB.p2), circle):
return False
if pointInCircle(AB.p1, circle) or pointInCircle(AB.p2, circle):
return True
vector_AB = Vector(AB.p1, AB.p2)
vector_AO = Vector(AB.p1, circle.center)
# two ndarray object
tAB = np.array([vector_AB.x, vector_AB.y])
tAO = np.array([vector_AO.x, vector_AO.y])
# vector AD, type: ndarray
tAD = ((tAB @ tAO) / (tAB @ tAB)) * tAB
# get point D
Dx, Dy = tAD[0] + AB.p1.x, tAD[1] + AB.p1.y
D = Point(Dx, Dy)
return pointInCircle(D, circle) and pointInSegment(D, AB)執行此函式的前提是還是匯入模組PointLine以及庫numpy
把上面的所有函式寫在一起,方便有需要的讀者使用:
from PointLine import *
class Circle(object):
"""Circle has 2 attributes: center and radius"""
def __init__(self, center, radius):
self.center = center
self.radius = radius
def pointInCircle(point, circle):
"""determine whether a point in a circle"""
return (pointDistance(point, circle.center) - circle.radius) < 1e-9
def lineIntersectsCircle(line, circle):
"""determine whether a line intersects a circle"""
dis = pointToLine(circle.center, line)
return dis - circle.radius < 1e-9
def segmentIntersectsCircle(AB, circle):
"""determine whether a segment intersects a circle"""
if not lineIntersectsCircle(Line(AB.p1, AB.p2), circle):
return False
if pointInCircle(AB.p1, circle) or pointInCircle(AB.p2, circle):
return True
vector_AB = Vector(AB.p1, AB.p2)
vector_AO = Vector(AB.p1, circle.center)
# two ndarray object
tAB = np.array([vector_AB.x, vector_AB.y])
tAO = np.array([vector_AO.x, vector_AO.y])
# vector AD, type: ndarray
tAD = ((tAB @ tAO) / (tAB @ tAB)) * tAB
# get point D
Dx, Dy = tAD[0] + AB.p1.x, tAD[1] + AB.p1.y
D = Point(Dx, Dy)
return pointInCircle(D, circle) and pointInSegment(D, AB)這就可以構成一個關於圓的相關問題的計算模組了。其中,引入的模組 PointLine 詳見我的上一篇部落格,連結前面已經給出了。
矩形
瞭解了圓的問題之後,我們看看矩形。這裡,我將圓與矩形的位置關係,也放在矩形中講解。
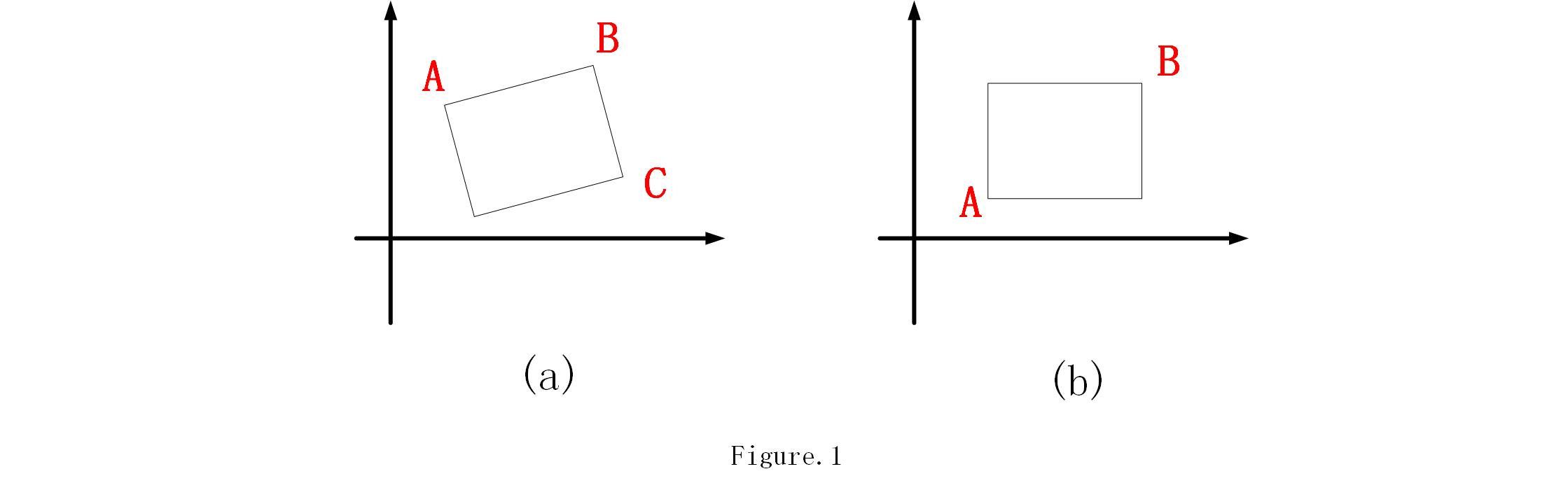
在二維平面空間中,若要定義矩形,則至少需要知道矩形的三個頂點,如Fig.1(a)所示。若是有矩形的邊一定和座標軸平行或垂直的條件,則只需要知道兩個頂點就行,如Fig.1(b)所示。為使演算法具有普遍性,我們研究Fig.1(a)所示的情況:
先給出矩形類:
class Rectangle(object):
"""four points are defined by clockwise order from upper left corner"""
def __init__(self, p1, p2, p3, p4):
self.p1, self.p2, self.p3, self.p4 = p1, p2, p3, p4
def getCenter(self):
return Point((self.p2.x + self.p4.x) / 2, (self.p2.y + self.p4.y) / 2)
def getXline(self):
rectangle_center = self.getCenter()
x_center = Point((self.p2.x + self.p3.x) / 2, (self.p2.y + self.p3.y) / 2)
return Line(x_center, rectangle_center)
def getYline(self):
rectangle_center = self.getCenter()
y_center = Point((self.p1.x + self.p2.x) / 2, (self.p1.y + self.p2.y) / 2)
return Line(y_center, rectangle_center)建構函式中,用矩形的四個頂點構造了一個矩形物件,其實,三個頂點就夠了,但在這裡,4個還是3個影響不大。
此外,除了初始化物件的建構函式,我還給出了三個矩形類的方法:
getCenter:用來返回矩形的中心點,也就是Fig.2(a)中的點
getXline:用來返回經過矩形的中心點
getYline:與矩形新的
顯而易見,如果對一個矩形物件執行以上三種方法,我們就可以得到一個以矩形中心點為座標原點,分別平行於矩形的高和寬的新的座標系。
1. 點和矩形的位置關係
明確了這一點,再看問題。首先解決點是否在矩形中的問題(這裡說的在矩形中,包括在矩形邊線上的情況):
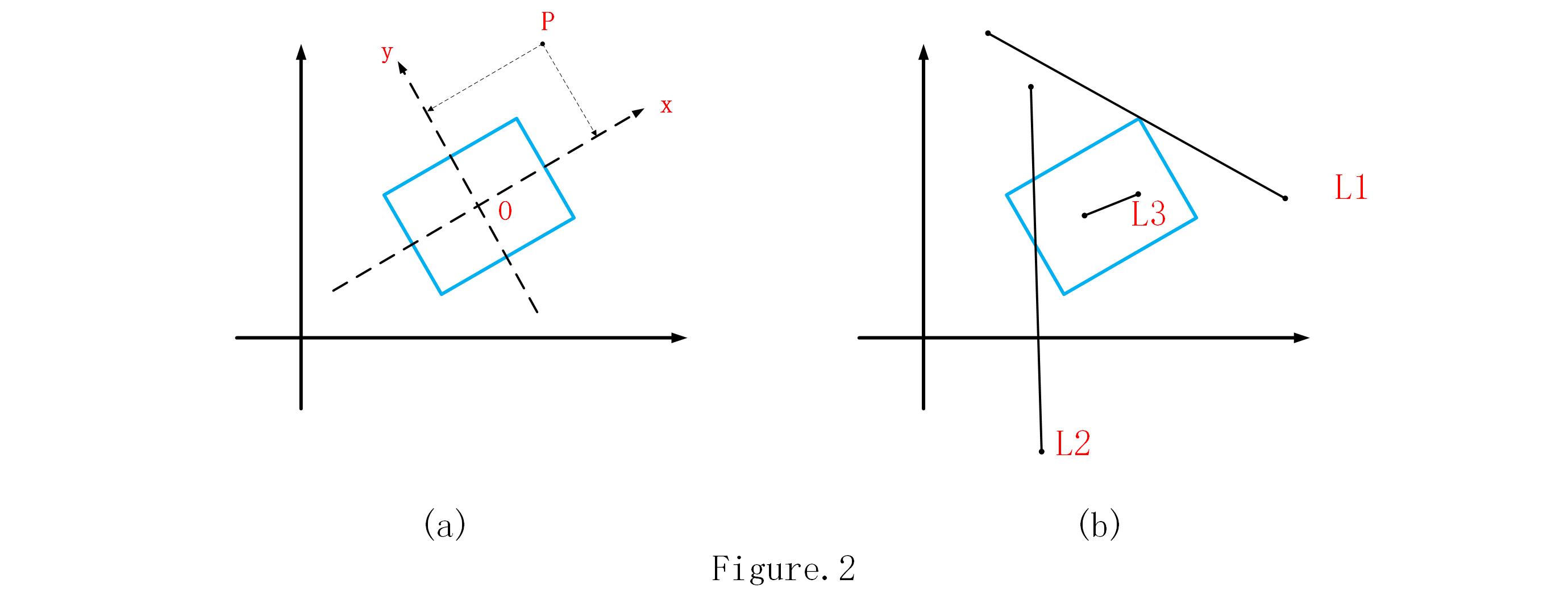
想要一個點,比如Fig.2(a)中的點
- 點
P 到新的X 軸的距離小於等於矩形高度的1/2 - 點
P 到新的Y 軸的距離小於等於矩形寬度的1/2
由此,可以寫出程式碼:
from PointLine import *
def pointInRectangle(point, rectangle):
"""determine whether a point in a rectangle"""
x_line = rectangle.getXline()
y_line = rectangle.getYline()
d1 = pointToLine(point, y_line) - pointToLine(rectangle.p2, y_line)
d2 = pointToLine(point, x_line) - pointToLine(rectangle.p2, x_line)
return d1 < 1e-9 and d2 < 1e-9函式 PointToLine() 在模組PointLine中給出了。
2. 線和矩形的位置關係
藉助點和矩形位置關係的判斷方法,我們可以判斷線段和矩形的位置關係。若一條線段和矩形相交(包括線段和矩形的邊相交以及線段在矩形內的情況),那麼線段必須滿足以下兩個條件之一:
- 線段的兩個端點全部在矩形內
- 線段和至少一條矩形的邊相交
如圖Fig.2(b)所示,線段和矩形相交的情況都可以被以上的兩個條件涵蓋。因此,根據這個思路寫出程式碼即可。
def segmentIntersectsRectangle(s, rectangle):
"""determine whether a segment intersects a rectangle"""
s1 = Segment(rectangle.p1, rectangle.p2)
s2 = Segment(rectangle.p2, rectangle.p3)
s3 = Segment(rectangle.p3, rectangle.p4)
s4 = Segment(rectangle.p4, rectangle.p1)
segmentsList = [s1, s2, s3, s4]
if pointInRectangle(s.p1, rectangle) and pointInRectangle(s.p2, rectangle):
return True
for segment in segmentsList:
if segmentsIntersect(segment, s):
return True
return False同理,可以寫出直線與矩形位置關係的判別函式。與線段不同的是,直線與矩形任意邊相交
是直線與矩形相交的充要條件。給出程式碼,如下:
def lineIntersectsRectangle(l, rectangle):
"""determine whether a line intersects a rectangle"""
s1 = Segment(rectangle.p1, rectangle.p2)
s2 = Segment(rectangle.p2, rectangle.p3)
s3 = Segment(rectangle.p3, rectangle.p4)
s4 = Segment(rectangle.p4, rectangle.p1)
segmentsList = [s1, s2, s3, s4]
for segment in segmentsList:
if segmentIntersectsLine(segment, l):
return True
return False3. 圓與矩形的碰撞檢測
現在,已經解決了圓和矩形的基本計算問題,那麼如何確定圓跟矩形的位置關係呢,換句話說,如何設計一個檢測圓與矩形是否碰撞的演算法?
和判斷線與矩形,點與矩形的辦法一樣,還是需要先根據矩形,建立新的座標系,如圖Fig.3所示,然後計算圓心到這個新座標系
先想一想圓和矩形碰撞的碰撞(相交)的情況,其實一共就三種:
- 圓只與矩形的一條邊相交,並不和矩形的頂點相交。如圖Fig.3(a)所示
- 圓與矩形的一個或多個頂點相交,也包含了矩形完全在圓內的情況。如圖Fig.3(b)所示
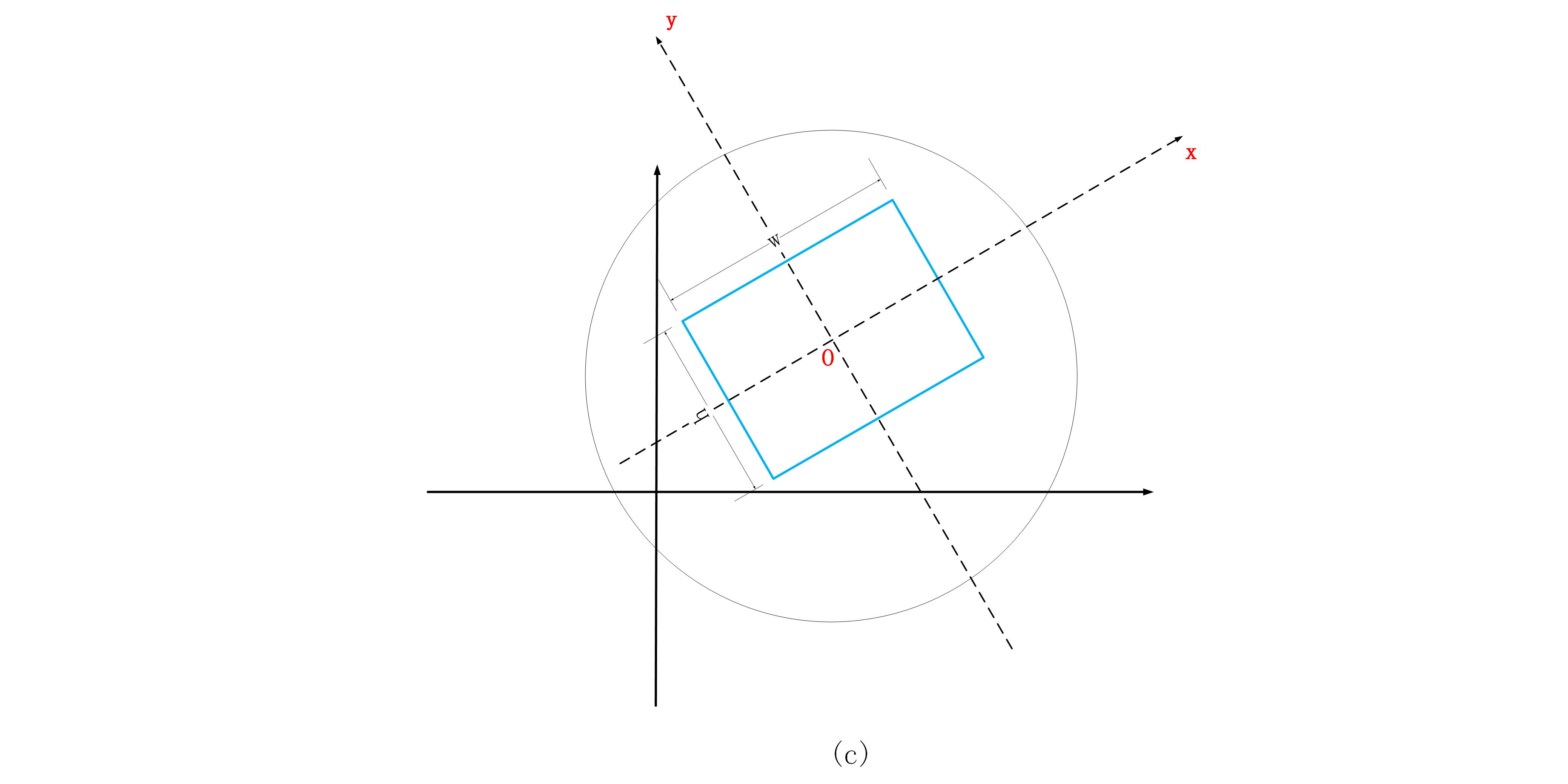
- 圓在矩形內。如圖Fig.3(c)所示
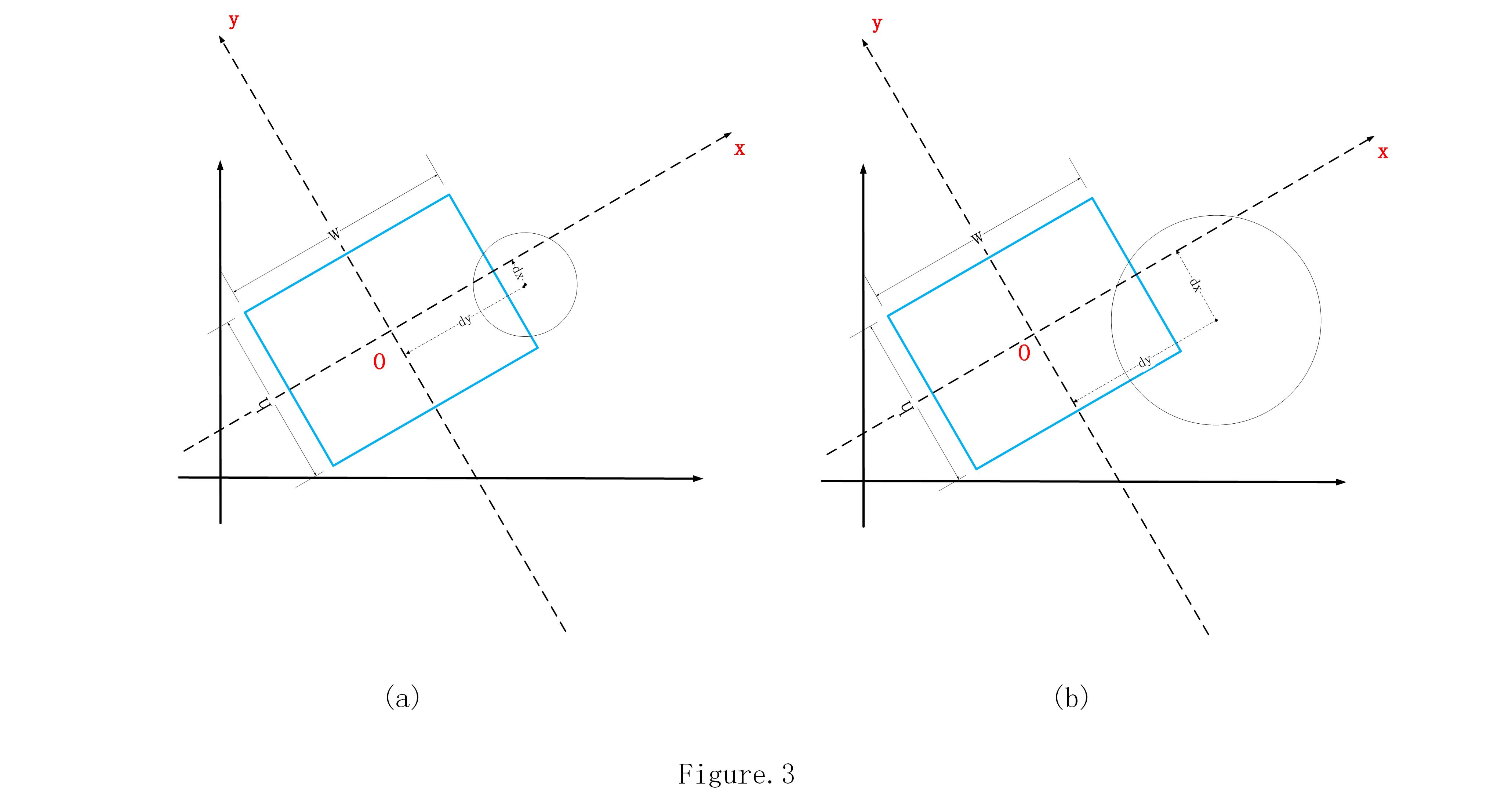
現在,設
可以按如下思路討論:
- 判斷矩形的四個頂點是否在圓中,只要有一個在,那麼矩形與圓碰撞。也就是上面說的情況2;
- 判斷
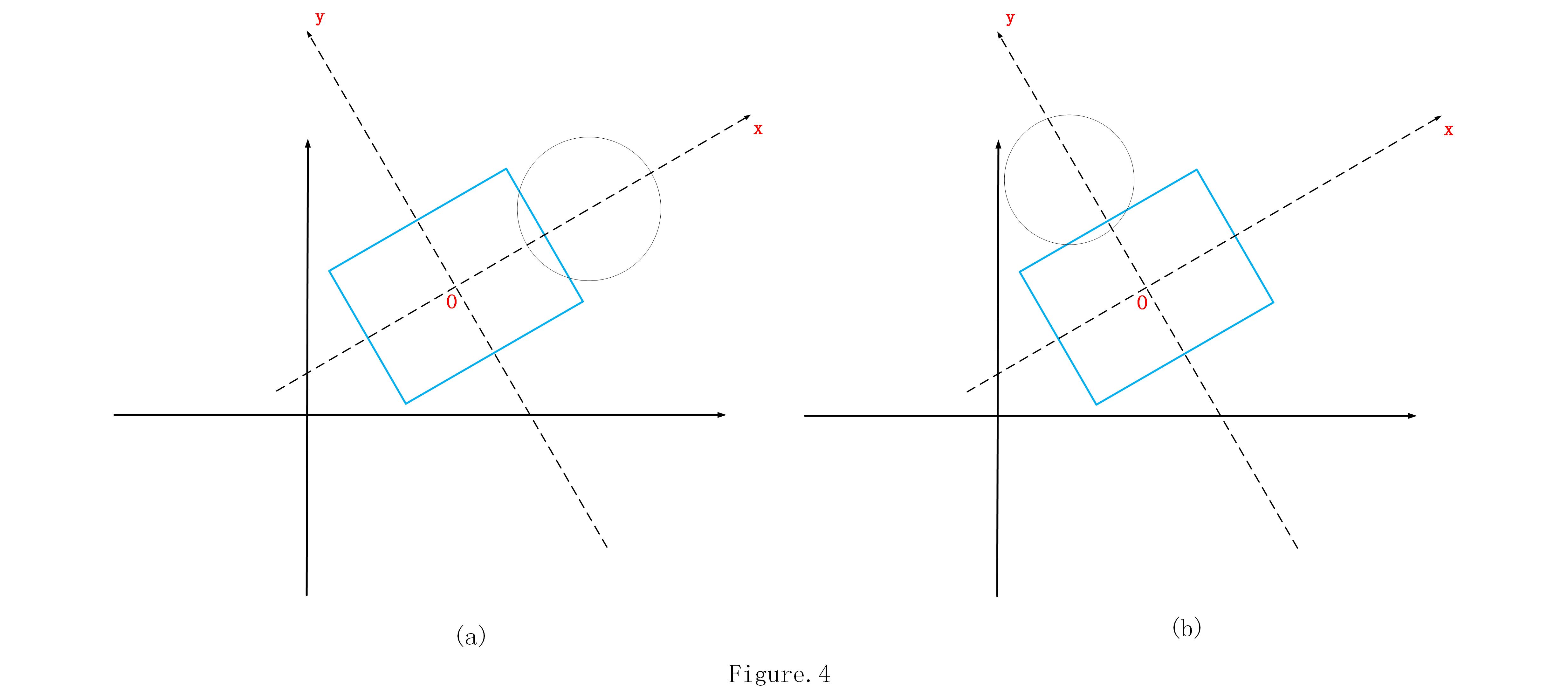
dx<=h2 且dy<=r+w2 是否成立,若成立,則圓一定與矩形的一條高相交,如圖Fig.4(a)所示; - 判斷
dy<=w2 且dy<=r+h2 是否成立,若成立,則圓一定與矩形的一條寬相交,如圖Fig.4(b)所示; - 最後需要說明的是,對於圓在矩形內的情況,2、3步就可以判斷了,無需再寫程式碼;
程式碼如下:
def circleIntersectsRectangle(circle, rectangle):
"""determine whether a circle intersects a rectangle"""
if pointInCircle(rectangle.p1, circle) or pointInCircle(rectangle.p1, circle) or\
pointInCircle(rectangle.p1, circle) or pointInCircle(rectangle.p1, circle):
return True
x_line = rectangle.getXline()
y_line = rectangle.getYline()
dx, dy = pointToLine(circle.center, x_line), pointToLine(circle.center, y_line)
h, w = pointDistance(rectangle.p1, rectangle.p2), pointDistance(rectangle.p2, rectangle.p3)
if dx - h / 2 < 1e-9 and dy - (circle.radius + w / 2) < 1e-9:
return True
if dy - w / 2 < 1e-9 and dx - (circle.radius + h / 2) < 1e-9:
return True
return False關於矩形的相關計算的完整程式碼我放在這裡,方便參考:
from Circle import *
from PointLine import *
class Rectangle(object):
"""four points are defined by clockwise order from upper left corner"""
def __init__(self, p1, p2, p3, p4):
self.p1, self.p2, self.p3, self.p4 = p1, p2, p3, p4
def getCenter(self):
return Point((self.p2.x + self.p4.x) / 2, (self.p2.y + self.p4.y) / 2)
def getXline(self):
rectangle_center = self.getCenter()
x_center = Point((self.p2.x + self.p3.x) / 2, (self.p2.y + self.p3.y) / 2)
return Line(x_center, rectangle_center)
def getYline(self):
rectangle_center = self.getCenter()
y_center = Point((self.p1.x + self.p2.x) / 2, (self.p1.y + self.p2.y) / 2)
return Line(y_center, rectangle_center)
def pointInRectangle(point, rectangle):
"""determine whether a point in a rectangle"""
x_line = rectangle.getXline()
y_line = rectangle.getYline()
d1 = pointToLine(point, y_line) - pointToLine(rectangle.p2, y_line)
d2 = pointToLine(point, x_line) - pointToLine(rectangle.p2, x_line)
return d1 < 1e-9 and d2 < 1e-9
def segmentIntersectsRectangle(s, rectangle):
"""determine whether a segment intersects a rectangle"""
s1 = Segment(rectangle.p1, rectangle.p2)
s2 = Segment(rectangle.p2, rectangle.p3)
s3 = Segment(rectangle.p3, rectangle.p4)
s4 = Segment(rectangle.p4, rectangle.p1)
segmentsList = [s1, s2, s3, s4]
if pointInRectangle(s.p1, rectangle) and pointInRectangle(s.p2, rectangle):
return True
for segment in segmentsList:
if segmentsIntersect(segment, s):
return True
return False
def lineIntersectsRectangle(l, rectangle):
"""determine whether a line intersects a rectangle"""
s1 = Segment(rectangle.p1, rectangle.p2)
s2 = Segment(rectangle.p2, rectangle.p3)
s3 = Segment(rectangle.p3, rectangle.p4)
s4 = Segment(rectangle.p4, rectangle.p1)
segmentsList = [s1, s2, s3, s4]
for segment in segmentsList:
if segmentIntersectsLine(segment, l):
return True
return False
def circleIntersectsRectangle(circle, rectangle):
"""determine whether a circle intersects a rectangle"""
if pointInCircle(rectangle.p1, circle) or pointInCircle(rectangle.p1, circle) or\
pointInCircle(rectangle.p1, circle) or pointInCircle(rectangle.p1, circle):
return True
x_line = rectangle.getXline()
y_line = rectangle.getYline()
dx, dy = pointToLine(circle.center, x_line), pointToLine(circle.center, y_line)
h, w = pointDistance(rectangle.p1, rectangle.p2), pointDistance(rectangle.p2, rectangle.p3)
if dx - h / 2 < 1e-9 and dy - (circle.radius + w / 2) < 1e-9:
return True
if dy - w / 2 < 1e-9 and dx - (circle.radius + h / 2) < 1e-9:
return True
return False
有關於計算幾何問題的完整專案我放在了github主頁上,並持續更新:Computational-Geometry. 歡迎訪問。