
matlab單目相機標定
一 matlab相機標定教程
二 利用焦距求
-
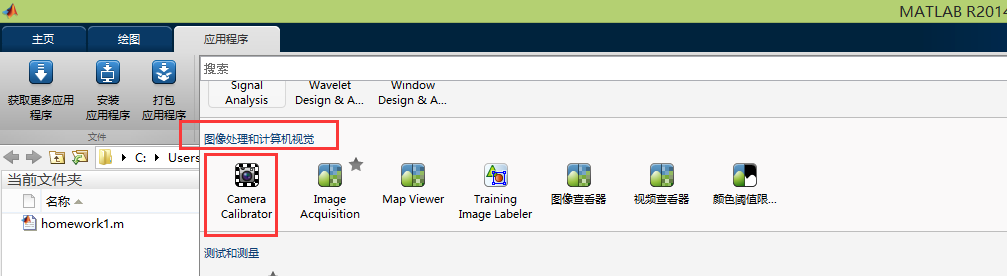
應用程式下找到Camera Calibration工具箱
-
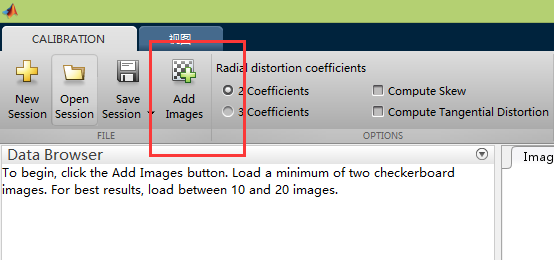
載入待標定的影象
-
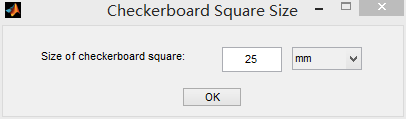
填寫棋盤格每個格子邊長的真實值
-
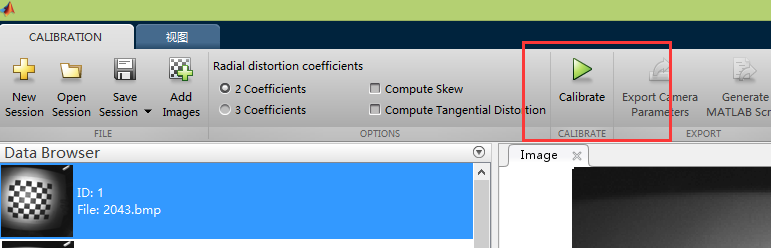
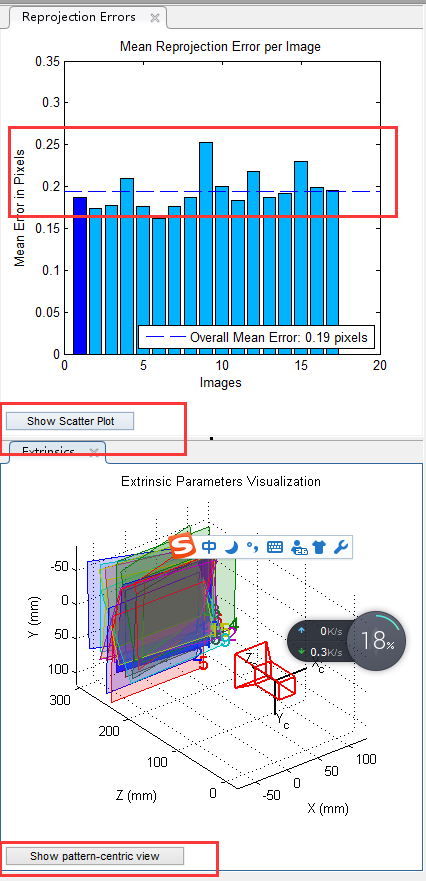
可以預覽成功檢測出棋盤格的影象,然後開始標定,點選Calibrate
-
平均誤差小於0.5即可
-
匯出相機標定引數
-
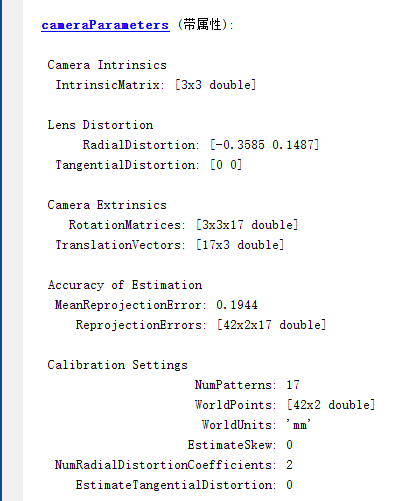
在matlab工作空間裡可以看到相機引數的屬性
-
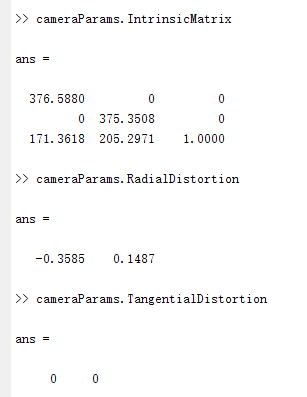
檢視相機的內參矩陣,徑向畸變和切向畸變。
-
根據相機焦距(f),高度(相機與拍攝物之間的距離),畫素距離計算實際距離

公式為:f/z(高度)= (畫素距離/實際距離)
相關推薦
matlab單目相機標定
一 matlab相機標定教程 二 利用焦距求 應用程式下找到Camera Calibration工具箱 載入待標定的影象 填寫棋盤格每個格子邊長的真實值 可以預覽成功檢測出棋盤格的影象,然後開始標定,點選Calibrate
opencv 單目相機標定 自帶例子程式的使用
<link rel="stylesheet" href="https://csdnimg.cn/release/phoenix/template/css/
單目相機標定-原理及實現
本文轉載自部落格:http://blog.csdn.net/before1993/article/details/51210595 一、 標定原理 相機標定的目的就是要獲得相機的內參數,得到二維平面畫素座標和三維世界座標的關係,從而進行三維重建。 1、幾個座標系
單目相機標定(Camera Calibration)
為什麼需要相機標定 通過image formation pipeline, 我們可以將已知世界座標系上的點對映在畫素座標系上,那麼如何預測影象上的點在3d世界中的位置呢? 第一步便是相機標定。相機標定的工作是消除鏡頭造成的影象變形(distortion)。
單目相機標定
主要轉自http://blog.csdn.net/dcrmg/article/details/52929669 執行前需要先準備標定圖片和記錄標定圖片列表的文字檔案,並放入程式所在目錄下 文字檔案的內容如下: calibdata.txt 裡面填寫好需要標
【轉載】單目相機標定原理
相機標定的目的是建立畫素座標系和世界座標系之間的關係。原理是根據攝像機模型,由已知特徵點的影象座標求解攝像機的模型引數,從而可以從影象中恢復出空間點的三維座標。所要求解的引數包括4個內參數和5個畸變引數,對於外引數,即旋轉矩陣的三個旋轉引數和平移向量的三個引數。 一. 針孔相機模型 攝像機成像模型一般有
OpenCV——單目相機標定
步驟: 1、製作標定板 此處製作邊長2.5cm的棋盤圖,規格大小為8*8,生成程式碼如下所示 //程式設計環境:VS2013, X64,OpenCV3.0.0 #include <iostream> #include <opencv2\
手把手教用matlab做無人駕駛(九)--專案1:使用單目相機檢測車道線
現在介紹一個專案,這個專案跟優達學城的課程有點像,可以學習一下.。 不管是含有ADAS功能的車還是依賴於多種感測器設計的自動駕駛汽車,它們需要的感測器都包括超聲波、雷達、鐳射雷達和攝像頭。接下來的專案闡述的是用單目相機實現自動駕駛過程中一部分內容,實現的內容如下: 1
單目視覺標定:世界座標系、相機座標系、影象座標系、畫素座標系——簡單粗暴,粗暴
1.正文 影象處理、立體視覺等等方向常常涉及到四個座標系:世界座標系、相機座標系、影象座標系、畫素座標系。例如下圖: 構建世界座標系只是為了更好的描述相機的位置在哪裡,在雙目視覺中一般將世界座標系原點定在左相機或者右相機或者二者X軸方向的中點。 接下來的重點,就是關於
ros學習之camera calibration 單目攝像頭標定
環境:ubuntu16.04 ros版本 kinetic 標定筆記本單目攝像頭 需要的準備:1、標定圖:下面這張列印到a4紙上。 2、攝像機驅動,我使用的是usb_cam,下載地址:https://github.com/ros-drivers/usb_c
OPENCV3.0 單目攝像頭標定(使用官方自帶的標定圖片)
// opencv_test.cpp : 定義控制檯應用程式的入口點。 // #include "stdafx.h" #include <opencv2/opencv.hpp> #include <highgui.hpp> #include "cv
ROS-單目攝像頭標定
前言:由於攝像圖內部與外部的原因,生成的影象往往會發生畸變,為了避免資料來源造成的誤差,需要針對攝像頭的引數進行標定。 ros官方提供了camera_calibration軟體包進行攝像頭標定。 一、安裝camera_calibration功能包 sudo apt-get install ros-
基於Matlab的立體相機標定StereoCalibration與目標三維座標定位
1.Matlab關於立體相機標定與目標三維座標定位的流程 環境:Matlab r2015b 找到 APPS-->Stereo Camera Calibrator-->Add Image, 此時會提示左右攝像頭拍攝的棋盤格標定圖片輸入路徑(Folder for i
PnP 單目相機位姿估計(一):初識PnP問題
簡介 理解 更多 IDE:visual studio 2013 使用庫:Eigen opencv2.4.9 文件版本:1.1 簡介 PnP問題是求解3D-2D點對運動的方法。他描述了當知道n個三維空間點
單目相機成像過程
[toc] # 單目相機成像過程 ## 01 理想情況下相機成像模型 在理想情況下,相機成像模型可以看作是小孔成像模型: | | | :----------------------------------------------------------: | |
MATLAB 相機標定(單目)使用工具箱TOOLBOX_calib
環境MATLAB R2014a+windows7 64位1.單目攝像機標定(1)首先把解壓的TOOLBOX_calib資料夾的路徑設定到MATLAB裡,在主頁->環境->設定路徑->選擇工具箱路徑,如圖:然後儲存,關閉(2)此時,將你採集到的圖片放到工具箱以
OpenCV相機標定及距離估計(單目)
相機標定基本知識 對於針孔攝像機模型,一幅檢視是通過透視變換將三維空間中的點投影到影象平面。投影公式如下: 或者 這裡(X, Y, Z)是一個點的世界座標,(u, v)是點投影在影象平面的座標,以畫素為單位。A被稱作攝像機矩陣,或者內參數矩陣。(cx, cy)是基
相機標定之單目
為什麼要進行攝像機標定 如圖1所示,被測平面和像平面平行且成像模型為理想的小孔成像模型,假定焦距為f、工作距離為d,則被測物OP和它的像O’P’關係可簡單的表示為:
單目,雙目,深度相機比較
因子 gpu clas 材質 als 分辨率 time 遠的 範圍 1.mono優點:結構簡單,成本低缺點:在單張圖片裏,無法確定一個物體的真實大小。它可能是一個很大但很遠的物體,也可能是一個很近很小的物體。通過相機的運動形成視差,可以測量物體相對深度。但是單目SLAM估計
相機標定與矯正opencv+MATLAB
open space stream 修復 tin net src 標定 不錯 博客轉載自:http://blog.csdn.net/Loser__Wang/article/details/51811347 本文目的在於記錄如何使用MATLAB做攝像機標定,並通過opencv