
ROS 下使用3D鐳射雷達 velodyne vlp-16
阿新 • • 發佈:2018-11-23
Velodyne VLP16型鐳射雷達橫向視角360°,縱向視角30°
系統和ROS版本:Ubuntu 14.04 ,ros indigo
1. 安裝驅動
sudo apt-get install ros-indigo-velodyne
2. 虛擬機器VM->Setting
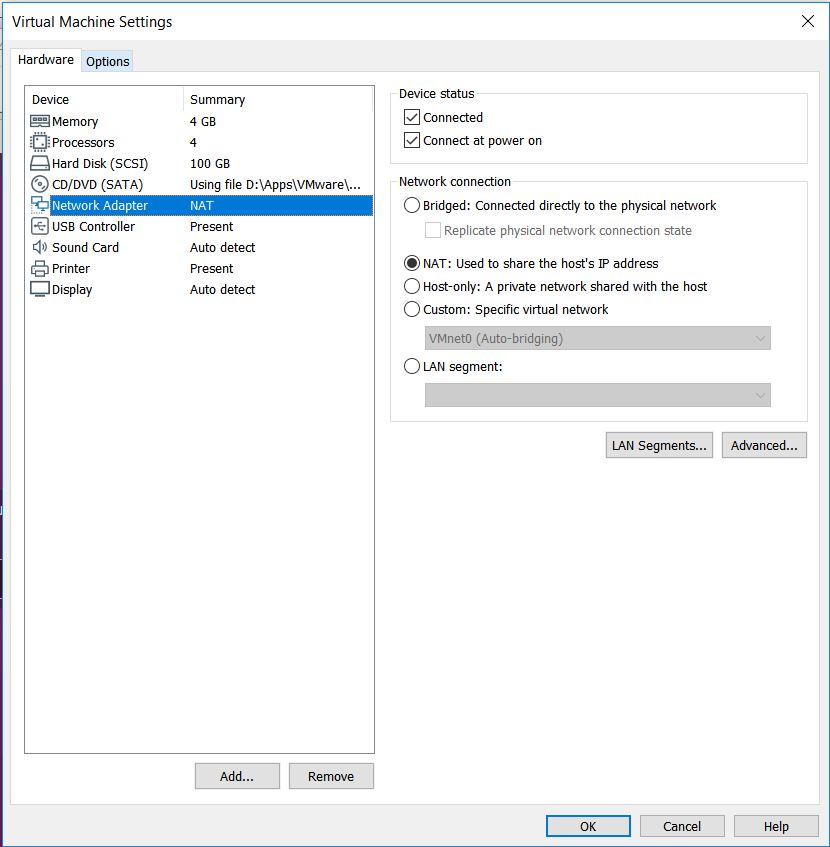
Network connection設定成為Bridged,然後將自己的IP設定成為接受鐳射資料的IP(主機和虛擬機器此時必須在同一網段)
sudo ifconfig erh0 192.168.1.28 255.255.255.0
如果鐳射已經插入網口,此時開啟虛擬機器瀏覽器輸入192.168.1.201可以看到鐳射雷達的配置檔案。
3. 新建一個ROS的工程
mkdir -p catkin_velodyne/src cd catkin_velodyne/src git clone https://github.com/ros-drivers/velodyne.git cd .. catkin_make source devel/setup.bash
4. 把Velodyne XML檔案轉成ROS節點的YAML檔案(轉換後生成VLP-16.yaml) (沒有校準檔案可以省略),或者去https://github.com/XinWenfei/useful
rosrun velodyne_pointcloud gen_calibration.py ~/filepath/VLP-16.xml
5. 載入
roslaunch velodyne_pointcloud VLP16_points.launch calibration:=/filepath/VLP-16.yaml
6. 實時顯示點雲圖
rosrun rviz rviz -f velodyne #-f: set fixed frame
然後在rviz中點Add by topic,增加PointCloud2,這樣就可以實時顯示獲取的3D點雲圖
7. 記錄資料
rosbag record -O saved_filename /velodyne_points