
對極幾何 本質矩陣 基礎矩陣
對極幾何是檢視幾何理論的基礎,對極幾何(Epipolar Geometry)描述了同一場景兩幅影象之間的視覺幾何關係。
設兩相機的中心分別為Ol和Or,兩影象平面分別為I和![]() ,P為共同視域中的場景空間點,它在兩幅影象平面上的像點分別為pl和pr。對極幾何關係中主要包含以下幾何元素:
,P為共同視域中的場景空間點,它在兩幅影象平面上的像點分別為pl和pr。對極幾何關係中主要包含以下幾何元素:
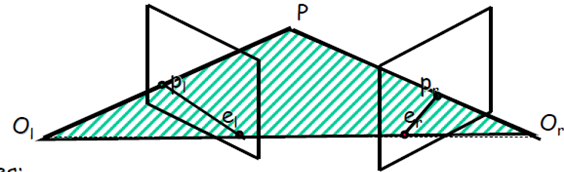
極平面:兩個相機座標原點Ol、Or和物體P組成的平面。
極線:極平面和兩個像平面的交線,即和
極點:為右相機原點在左像平面的投影;
為左相機原點在右像平面的投影
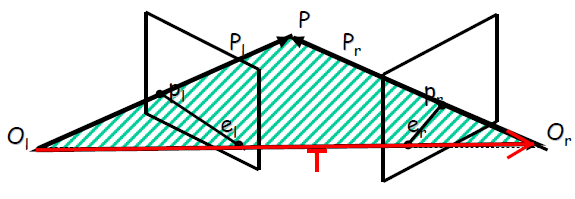
我們要研究的極線約束:兩極線上點的對應光系(和
當然也滿足)
如果有兩個相機,cam1在建築物的左側,cam2在建築物的右側,拍攝得到兩張照片.像平面是無限延伸的,照片只是像平面的一部分.

左側是cam1的像平面,右側是cam2的像平面。
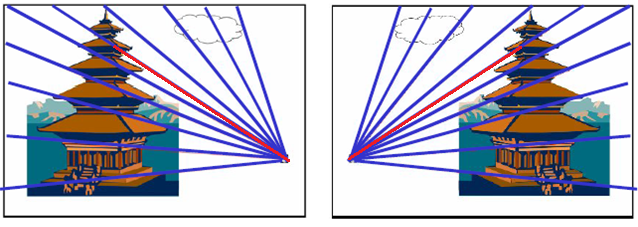
紅線表示相應的對極線,這些對極線滿足一定的幾何約束。
本質矩陣
兩個相機座標系的關係:
是物體P在
相機座標系的位置,
是物體P在
座標系的位置。
相對於
的旋轉矩陣為R,位移為T。則:
![]()
由於R是正交矩陣,可以寫成:![]()
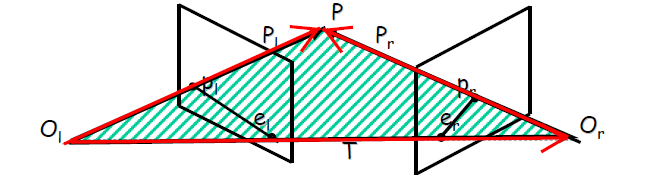
由於三向量共面,如下圖,所以它們的混合積為0.
將叉乘寫成矩陣相乘的形式:
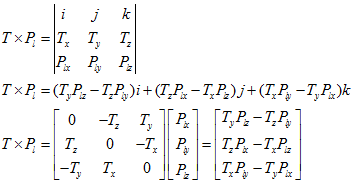
令: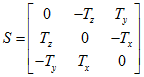 ,S是一個秩為2的矩陣,則:
,S是一個秩為2的矩陣,則:
![]()
顯然,和
可以通過矩陣E=RS來約束,我們稱E為本質約束(Essential Matrix)。它具有兩個性質:
- 秩為2
- 只依賴於外部引數R和T
基礎矩陣
繼續前面的本質矩陣,結合成像的集合關係:
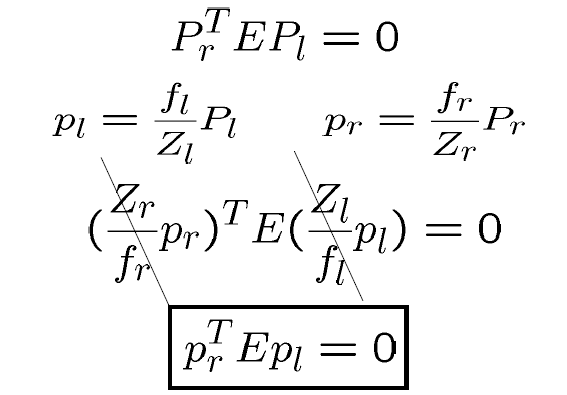
這裡的和
是在單位距離座標系下的位置.如果我們要分析的是影象,需要轉到畫素座標系下,此時:

從而有:
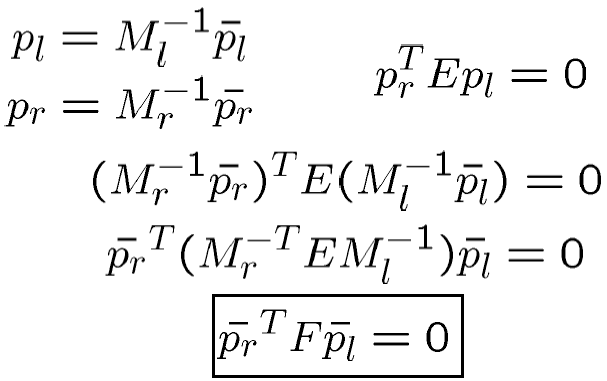
我們稱矩陣F為基礎矩陣:![]() ,性質是:
,性質是:
- 秩為2
- 依賴於相機內參和外部引數R和T
基礎矩陣給出了:在已知一個點和F的情況下,其匹配點的直線約束方程:

直線約束方程為:![]()
進一步分析:![]() 而這裡的F是秩為2的矩陣,所以存在:
而這裡的F是秩為2的矩陣,所以存在:![]() 和
和![]() 。
。
e表示它滿足所有的直線約束,也就是上面圖中那一堆直線的交點,物理意義便是cam2(cam1)在cam1(cam2)的像平面的投影,即極點。
使用SVD分解即可求得極點。