MATALB與VREP聯合模擬--UR5機械臂動力學模擬
VREP是一款很不錯的機器人模擬軟體,可以和多個跨平臺通訊,於是準備用來和MATLAB進行聯合模擬。但是查了很多資料並未找到使用MTALAB/Simulink模組進行聯合模擬的,進過一番折騰終於實現基本的聯合模擬,記錄於此以備後續學習。
話不多說,進入正題:
一、軟體環境配置
1、軟體版本
VREP: V-REP PRO EDU Version 3.3.2(備註:測試過3.4版本似乎有些問題)MATLAB:Matlab2016b
(1)開啟VREP的安裝路徑中的shareMemoryCommunicationPlugin資料夾,如下:C:\ProgramFiles(x86)\V-REP3\V-REP_PRO_EDU\programming\sharedMemoryCommunicationPlugin
(2)拷貝其中的v_repExtShareMemory.dll檔案到VREP的主資料夾下(備註:C:\ProgramFiles(x86)\V-REP3\V-REP_PRO_EDU)
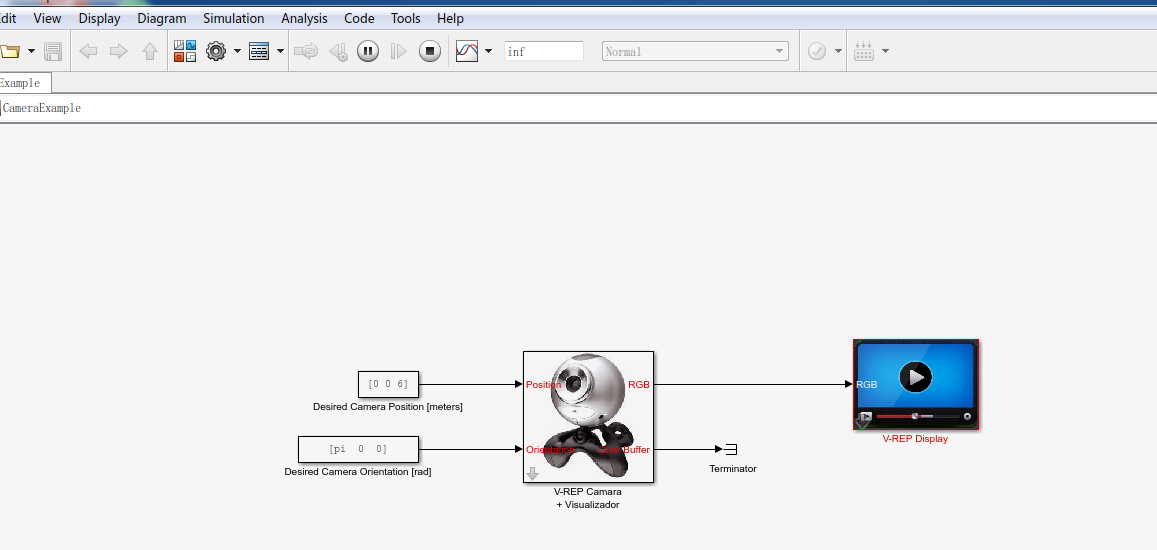
(3)回到shareMemoryCommunicationPlugin資料夾拷貝其中的example Simulink壓縮包和BloqueMemoriaCompartida.slx到MATLAB的工作路徑下。2、模擬平臺通訊測試解壓exampleSimulink壓縮包,在MATLAB中開啟CameraExample.slx檔案,在VREP中開啟camara模擬環境。先執行MATLAB,再執行VREP。如圖所示: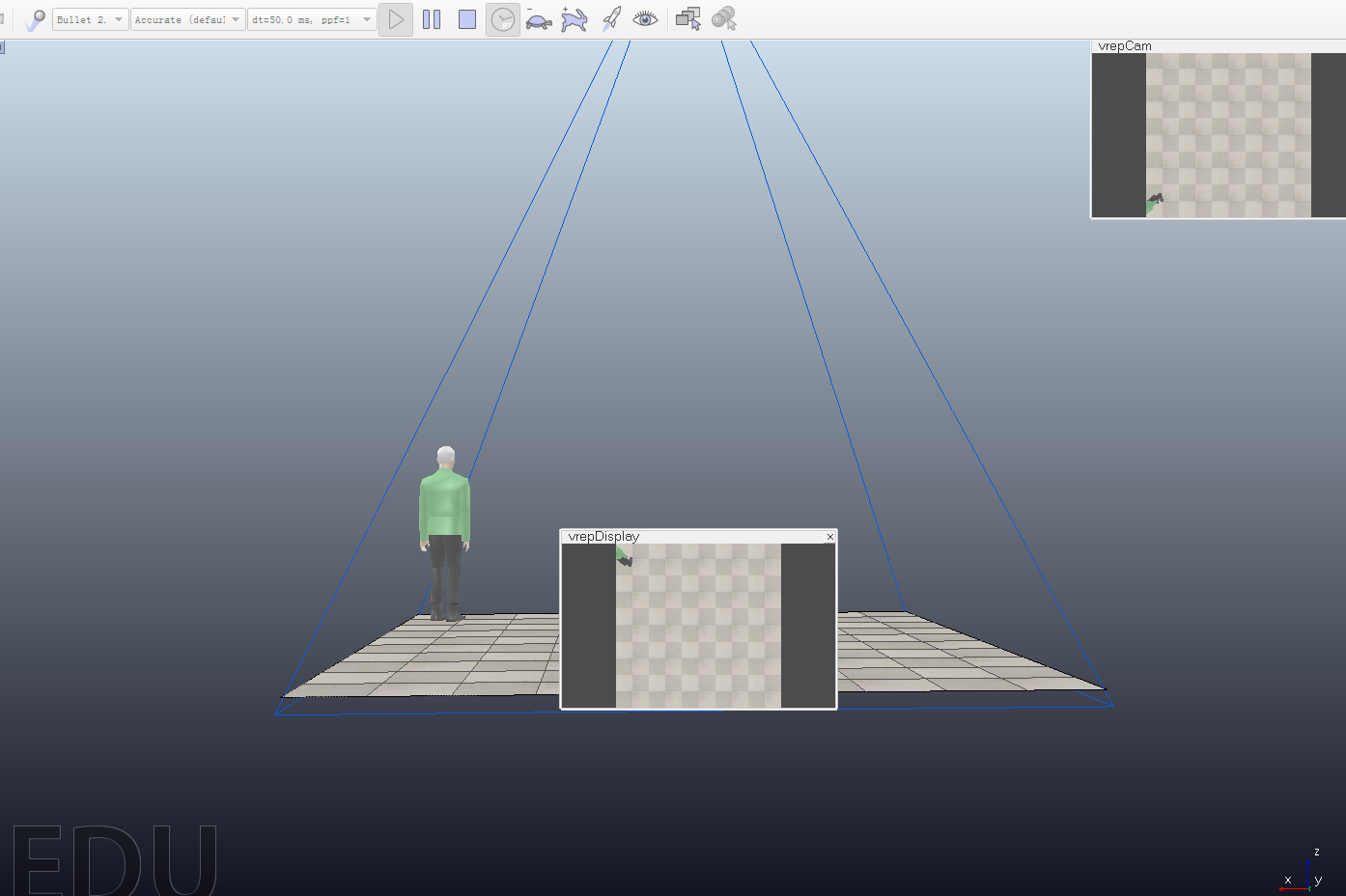
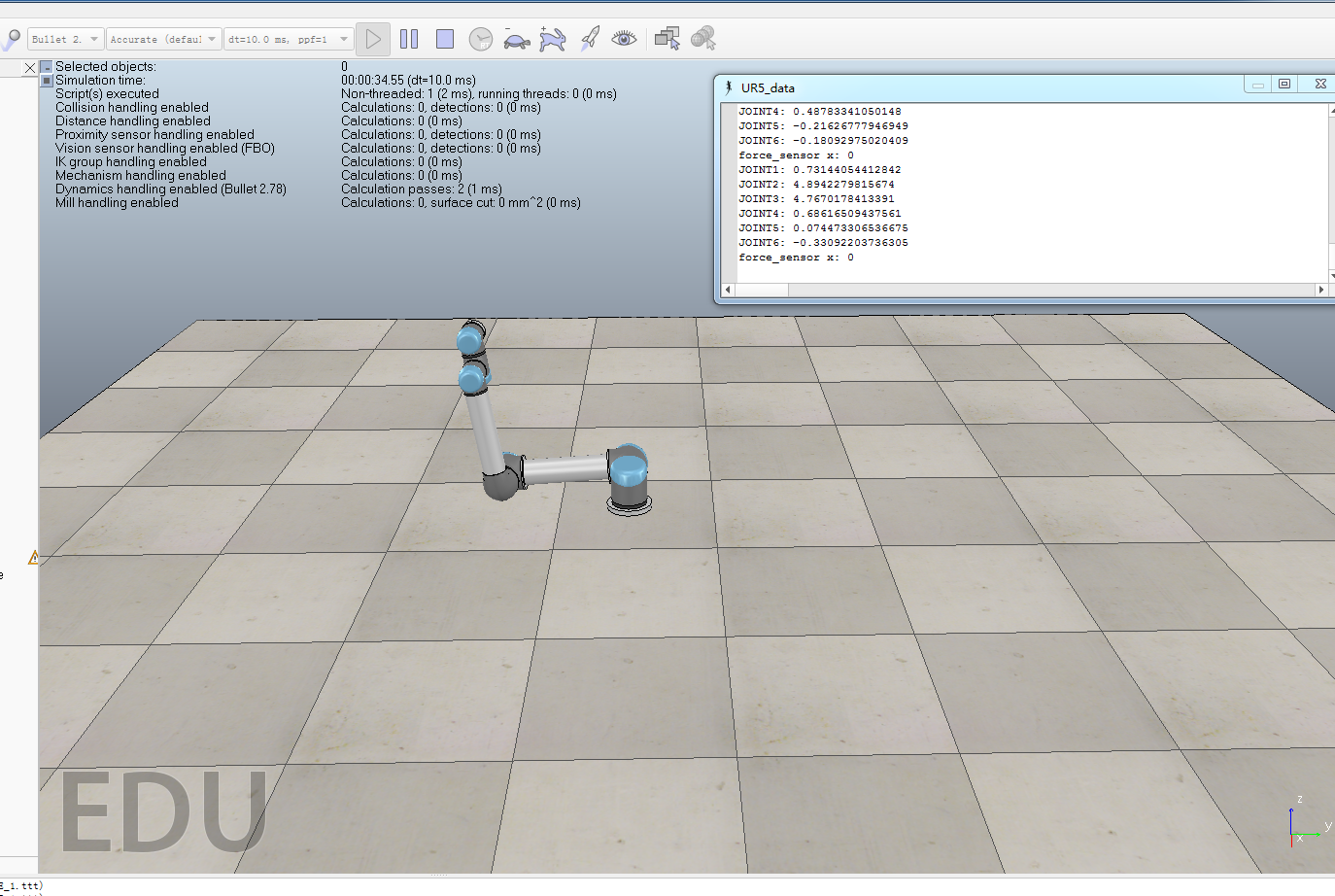
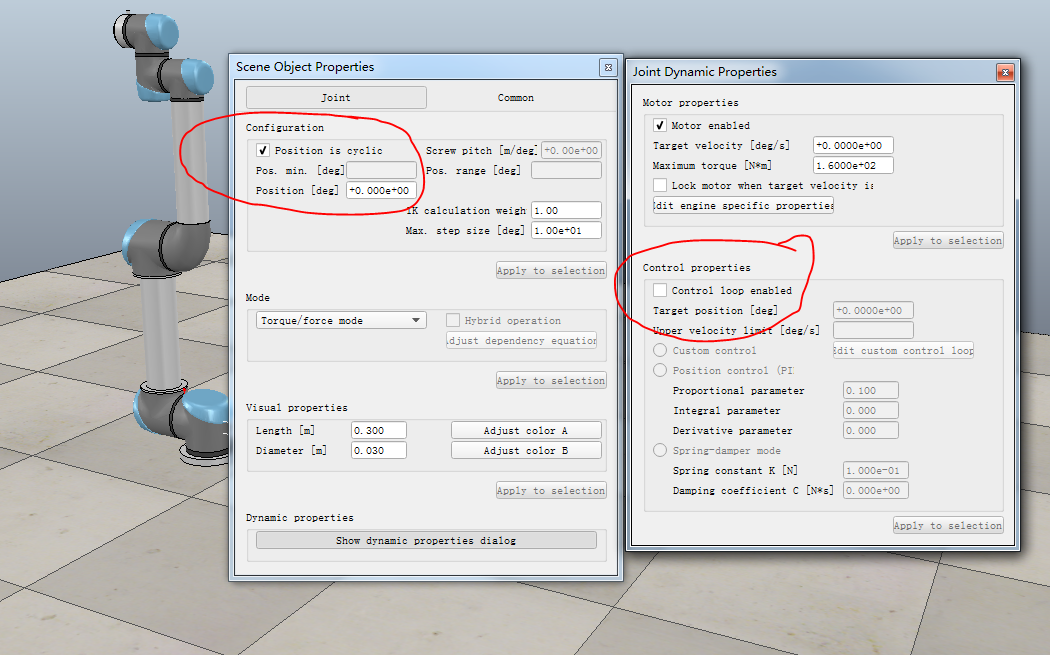
二、VREP中UR5機械臂配置1、配置UR5機械臂通訊控制引數。
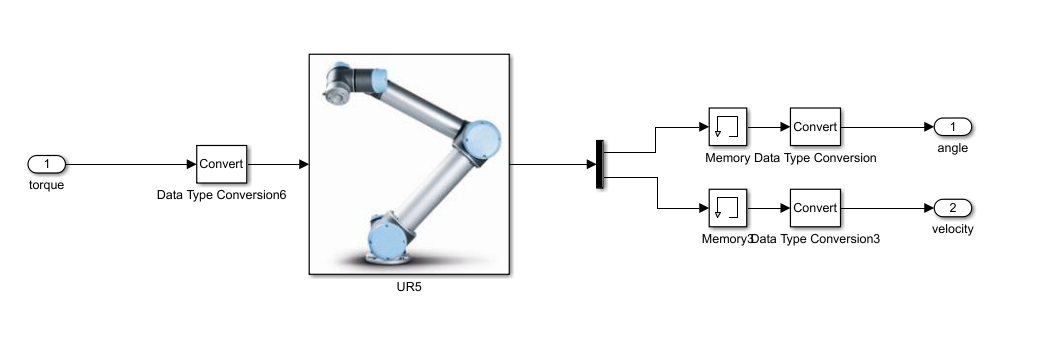
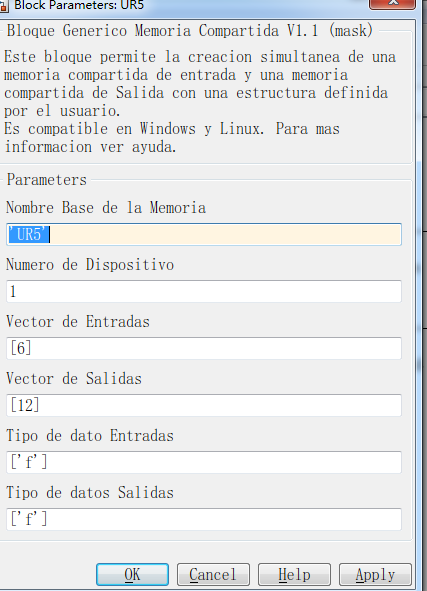
三、MATLAB中的模擬環境配置在MATLAB工作路徑下新建一個資料夾ur5_test把剛才建立的UR5模擬場景檔案放在裡面,再把examp Similink這個檔案中的matlabGenericSHM.mexw32和matlabGenericSHM.mexw64以及BloqueMemoriaCompartida.slx拷貝到ur5_test資料夾下,在matlab中開啟這個slx檔案,並新建一個simulink模組UR5_control.slx檔案,將剛才開啟的檔案裡的模組拷貝至UR5_control.slx裡面,開啟後配置如下:
四、MATLAB與VREP聯合模擬-控制器以及外圍模組搭建如下圖所示,