
kinect V2 在ROS下使用
阿新 • • 發佈:2019-01-10
roslaunch kinect2_bridge kinect2_bridge.launch
roslaunch kinect2_bridge kinect2_bridge.launch publish_tf:=true
rosrun kinect2_viewer kinect2_viewer sd cloud
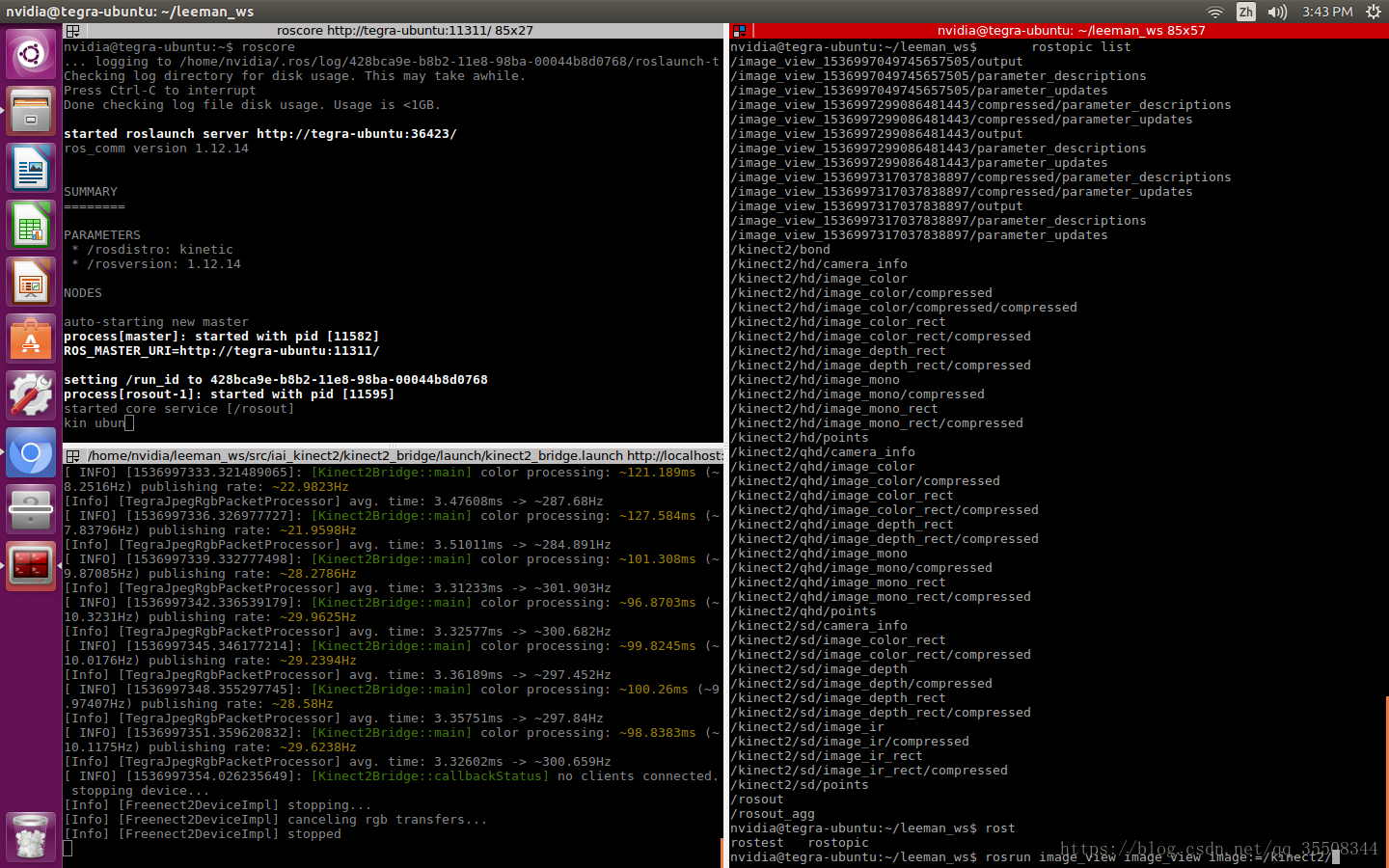
kinect2 topic:
[email protected]:~$ rostopic list /image_view_1536997049745657505/output /image_view_1536997049745657505/parameter_descriptions /image_view_1536997049745657505/parameter_updates /image_view_1536997299086481443/compressed/parameter_descriptions /image_view_1536997299086481443/compressed/parameter_updates /image_view_1536997299086481443/output /image_view_1536997299086481443/parameter_descriptions /image_view_1536997299086481443/parameter_updates /image_view_1536997317037838897/compressed/parameter_descriptions /image_view_1536997317037838897/compressed/parameter_updates /image_view_1536997317037838897/output /image_view_1536997317037838897/parameter_descriptions /image_view_1536997317037838897/parameter_updates /image_view_1536997451097461084/output /image_view_1536997451097461084/parameter_descriptions /image_view_1536997451097461084/parameter_updates /image_view_1536997511248733086/output /image_view_1536997511248733086/parameter_descriptions /image_view_1536997511248733086/parameter_updates /kinect2/bond /kinect2/hd/camera_info /kinect2/hd/image_color /kinect2/hd/image_color/compressed /kinect2/hd/image_color/compressed/compressed /kinect2/hd/image_color_rect /kinect2/hd/image_color_rect/compressed /kinect2/hd/image_depth_rect /kinect2/hd/image_depth_rect/compressed /kinect2/hd/image_mono /kinect2/hd/image_mono/compressed /kinect2/hd/image_mono_rect /kinect2/hd/image_mono_rect/compressed /kinect2/hd/points /kinect2/qhd/camera_info /kinect2/qhd/image_color /kinect2/qhd/image_color/compressed /kinect2/qhd/image_color_rect /kinect2/qhd/image_color_rect/compressed /kinect2/qhd/image_depth_rect /kinect2/qhd/image_depth_rect/compressed /kinect2/qhd/image_mono /kinect2/qhd/image_mono/compressed /kinect2/qhd/image_mono_rect /kinect2/qhd/image_mono_rect/compressed /kinect2/qhd/points /kinect2/sd/camera_info /kinect2/sd/image_color_rect /kinect2/sd/image_color_rect/compressed /kinect2/sd/image_depth /kinect2/sd/image_depth/compressed /kinect2/sd/image_depth_rect /kinect2/sd/image_depth_rect/compressed /kinect2/sd/image_ir /kinect2/sd/image_ir/compressed /kinect2/sd/image_ir_rect /kinect2/sd/image_ir_rect/compressed /kinect2/sd/points /rosout /rosout_agg
關於kinect話題類別
kinect的資料是分成3類的,包括hd,qhd,sd。
其中hd是原始解析度,19201080,
qhd是他的一般920540,
sd是一半的一半。560*270。
在處理的時候可以根據要求,來接收不同的話題。我的電腦是8個g的記憶體,在處理的時候,如果呼叫qhd的資料,處理速度就還行,hd的就有點慢了
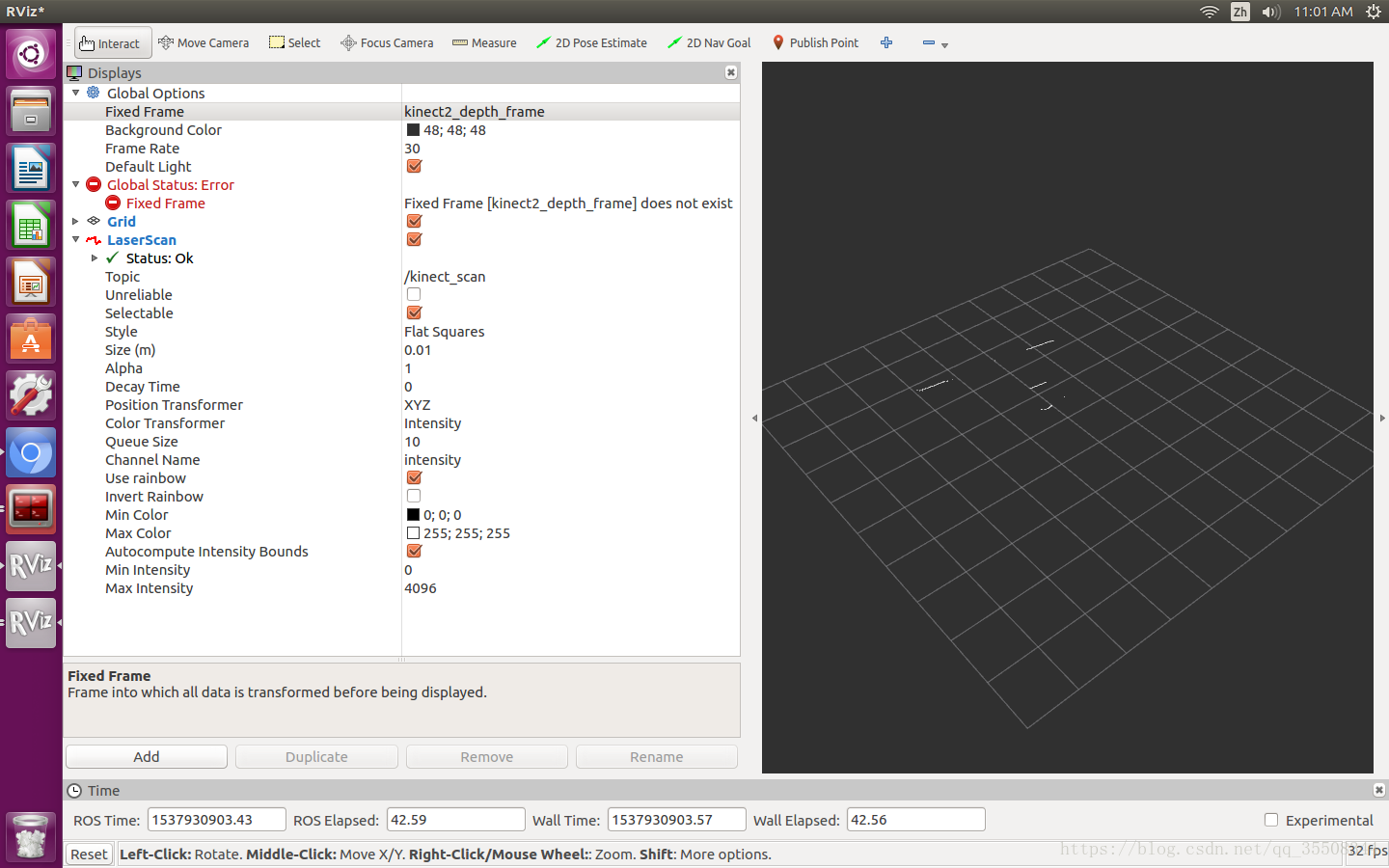
kinect V2 depthImage convert to laserscan
reference link新增連結描述
download deepthimage_to_laserscan
git clone https://github.com/ros-perception/depthimage_to_laserscan.git
add a launch
<launch> <!-- start sensor--> <include file="$(find kinect2_bridge)/launch/kinect2_bridge.launch"/> <!-- Run the depthimage_to_laserscan node --> <node pkg="depthimage_to_laserscan" type="depthimage_to_laserscan" name="depthimage_to_laserscan" output="screen"> <!--輸入影象--> <remap from="image" to="/kinect2/qhd/image_depth_rect"/> <!--相關影象的相機資訊。通常不需要重新變形,因為camera_info將從與影象相同的名稱空間訂閱。--> <remap from="camera_info" to="/kinect2/qhd/camera_info" /> <!--輸出鐳射資料的話題--> <remap from="scan" to="/kinect_scan" /> <!--鐳射掃描的幀id。對於來自具有Z向前的“光學”幀的點雲,該值應該被設定為具有X向前和Z向上的相應幀。--> <param name="output_frame_id" value="/kinect2_depth_frame"/> <!--用於生成鐳射掃描的畫素行數。對於每一列,掃描將返回在影象中垂直居中的那些畫素的最小值。--> <param name="scan_height" value="30"/> <!--返回的最小範圍(以米為單位)。小於該範圍的輸出將作為-Inf輸出。--> <param name="range_min" value="0.45"/> <!--返回的最大範圍(以米為單位)。大於此範圍將輸出為+ Inf。--> <param name="range_max" value="8.00"/> </node> </launch>
rostopic list
[email protected]:~$ rostopic list
/Kinect2scan
/clicked_point
/depthimage_to_laserscan/parameter_descriptions
/depthimage_to_laserscan/parameter_updates
/initialpose
/kinect2/bond
/kinect2/hd/camera_info
/kinect2/hd/image_color
/kinect2/hd/image_color/compressed
/kinect2/hd/image_color_rect
/kinect2/hd/image_color_rect/compressed
/kinect2/hd/image_depth_rect
/kinect2/hd/image_depth_rect/compressed
/kinect2/hd/image_mono
/kinect2/hd/image_mono/compressed
/kinect2/hd/image_mono_rect
/kinect2/hd/image_mono_rect/compressed
/kinect2/hd/points
/kinect2/qhd/camera_info
/kinect2/qhd/image_color
/kinect2/qhd/image_color/compressed
/kinect2/qhd/image_color_rect
/kinect2/qhd/image_color_rect/compressed
/kinect2/qhd/image_depth_rect
/kinect2/qhd/image_depth_rect/compressed
/kinect2/qhd/image_mono
/kinect2/qhd/image_mono/compressed
/kinect2/qhd/image_mono_rect
/kinect2/qhd/image_mono_rect/compressed
/kinect2/qhd/points
/kinect2/sd/camera_info
/kinect2/sd/image_color_rect
/kinect2/sd/image_color_rect/compressed
/kinect2/sd/image_depth
/kinect2/sd/image_depth/compressed
/kinect2/sd/image_depth_rect
/kinect2/sd/image_depth_rect/compressed
/kinect2/sd/image_ir
/kinect2/sd/image_ir/compressed
/kinect2/sd/image_ir_rect
/kinect2/sd/image_ir_rect/compressed
/kinect2/sd/points
/kinect_scan
/move_base_simple/goal
/rosout
/rosout_agg
/tf
/tf_static