四旋翼初次組裝
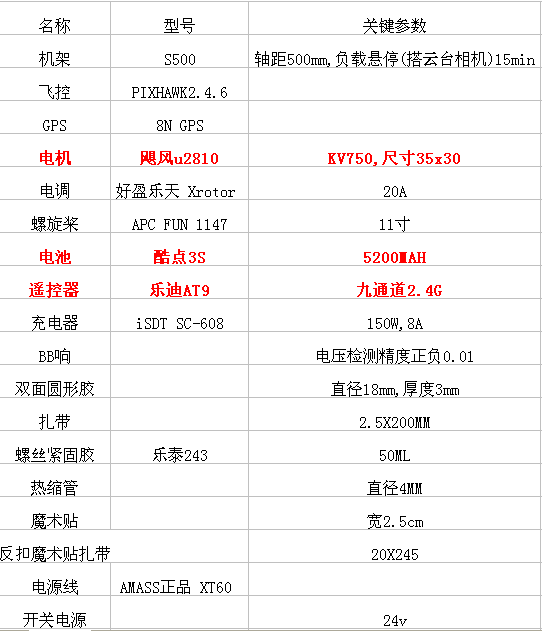
一 四旋翼配置清單
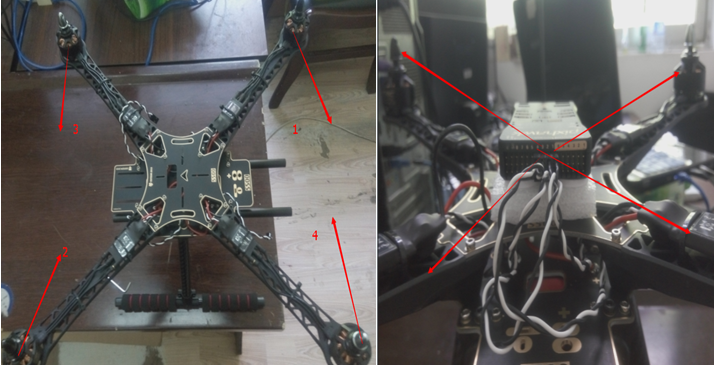
初次嘗試組裝四旋翼,在淘寶上買相關配件,進行組裝。初次組裝,比較亂。
二 裝機步驟
1:機臂與上層中心板安裝,2.5mm螺絲。
2:香蕉頭灌錫,電機三線插入,連上電調線
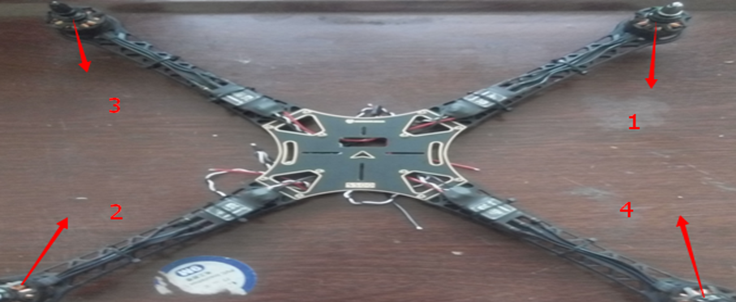
3:裝上四個電機,3mm螺絲。注意電機的順序,銀色冒為1,2號對角,黑色冒3,4號對角,以飛控箭頭為正方向。
4:安裝腳架
5:連線上中心板和下中心板。注意先在下層板上的+-點上點錫,多點,將電調的紅黑線分別點在正負極上,電源模組的公頭減掉,露出線也含在下層板的電源正負點上。
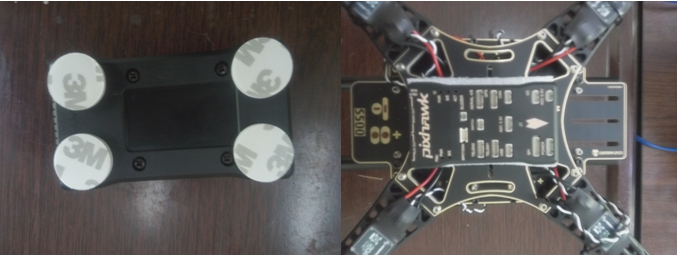
6:安裝飛控,3MM雙面膠,飛控下面最好用減震板,沒有臨時用泡沫墊起來。
7:安裝GPS支架,上面仍然用3MM膠連線GPS,GPS箭頭方向與飛控方向一致。
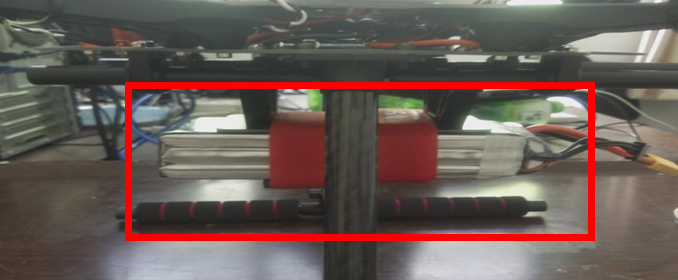
8:電池固定,用反扣魔術帶反扣電池
9:安裝遙控接收器,電調也可以用3MM雙面膠站在下層板上
10:初步完成,後面接線。
總結:裝機過程應適當靈活,除了下層板的正負焊點照著連外,其他可按照自己的想法佈置。走線應適當合適美觀,用紮帶紮好。






三接線
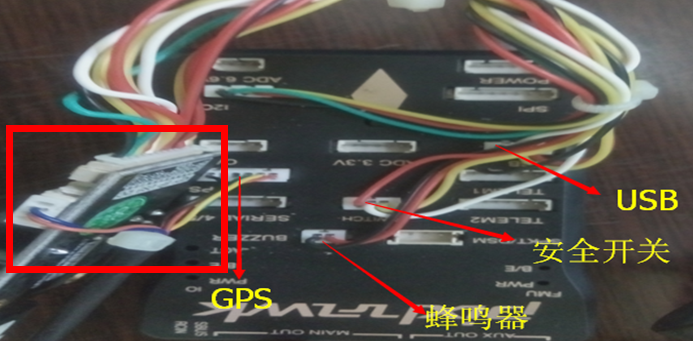
飛控接線
蜂鳴器-BUZZER
安全開關-SWITCHER
IIC-IIC
USB-usb
圖中的將其模組化,變成了整合小板,接法一樣(可從排針數判斷哪個口對應)
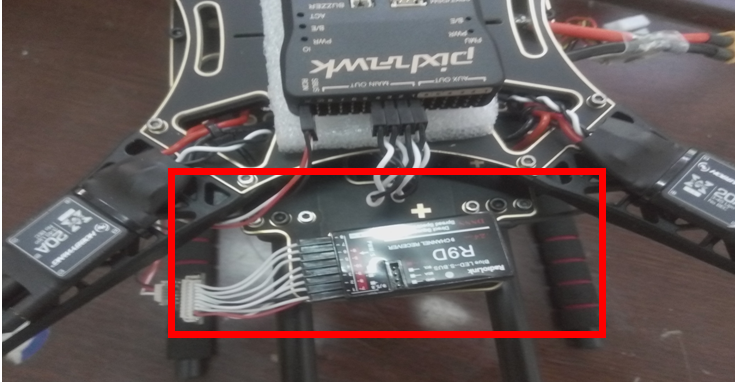
接收機接線:
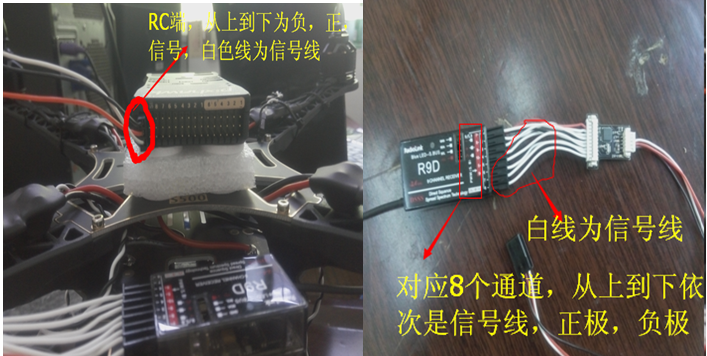
不用SBUS功能,要用PPM模組,如圖,PPM模組一端8通道。分別接接收機的8個通道(反面有標註,如上接就行),另一端接飛控(PIXHAWK)的RC端。整體如下:
電調接線:
電機安裝方向如圖,對應的電調的訊號線接入飛控的MAIN OUT的1,2,3,4.飛控從上到下為負,正,訊號線。黑色為負。白色為訊號線
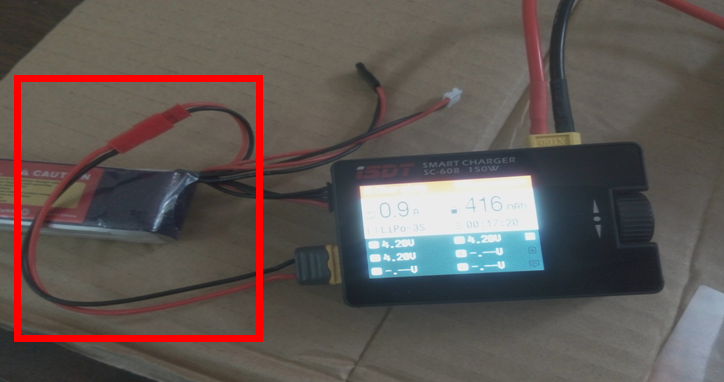
動力電池充電接線:
電池的兩根線都要接,排線為平衡口,XT60的為充電口
平衡充電器進入設定模式,選擇charge充電模式,3s,Lipo4.2V,8A,設定好後選擇start即可(平衡充電器啟動會自檢,先不要插電池)
遙控器電池充電接線
和動力電池類似,兩跟線都要接,區別是遙控器電池一般沒有XT60頭,額外加上去
充電器設定將電流設定2A,其他一樣。