
機器人學筆記之——操作臂運動學:座標系的標準命名以及工具的定位
阿新 • • 發佈:2018-11-21
0. 座標系的標準命名
為了規範起見,我們有必要給機器人和工作空間賦予專門的命名和專門的座標系。
0.0 基座標系 {B}
基座標系{B}位於操作臂的基座上,其實它和座標系{0}指的是同一個東西,只不過名稱不同而已。由於它固連於操作臂的靜止部位,所以也稱連桿0
0.1 工作臺座標系 {S}
工作臺,顧名思義就是。。。就是工作臺嘛,工作臺座標系的確定往往與要完成的任務有關,如下圖所示的工作臺座標系就被設定在工作臺的一個角上。對於使用機器人的人來說,工作臺座標系是一個通用的座標系,機器人的所有運動都是相對於這個座標系來執行的。所以我們還會稱它為:任務座標系、世界座標系或者通用座標系。工作臺座標系通常需要根據基座標系來確定。

0.2 腕部座標系 {W}
腕部座標系固連在操作臂的末端連桿上,同時也被稱為座標系{N}。在大多數情況下,腕部座標系的原點被設定在操作臂的腕關節上。它隨末端連桿移動。
0.3 工具座標系 {T}
工具座標系{T}固連在末端執行器的末端,當末端執行器只有一個夾持器的時候,工具座標系就會被確定在夾持器指端之間。通常我們會根據腕部座標系來確定工具座標系。上圖的工具座標系的原點就被定義在銷軸的末端。
0.4 目標座標系 {G}
目標座標系的存在就是為了描述機器人末端的工具座標系在結束運動時應該在的位置和姿態,即再運動結束時工具座標系和目標座標系應該重合。目標座標系通常會根據工作臺座標系來定義。
1. 工具的定位
機器人的功能之一就是能夠計算出它所夾持的工具相對於工作臺座標系的位姿,也就是計算出工具座標系相對於工作臺座標系的變換矩陣。
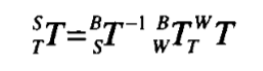
上述方程在某些機器人系統中被稱為WHERE函式,用它可以計算出手臂的位置。