
機器人學筆記之——操作臂運動學:連桿描述
阿新 • • 發佈:2018-11-21
操作臂運動學概述
操作臂運動學研究操作臂的運動特性,而不考慮使操作臂產生運動時施加的力。本部分主要討論的是操作臂的正運動學,只研究靜止狀態下操作臂連桿的位置和姿態問題,暫時不考慮速度和加速度。
為了處理操作臂複雜的幾何引數,我們會在操作臂的每一個連桿上附加上一個連桿座標系,以便於我們來討論各個連桿座標系之間的關係,本部分主要是將關節變數作為自變數,描述操作臂末端執行器的位置和姿態與操作臂底座的函式關係。
0. 連桿描述
在理想狀態下,忽略掉實際情況中的結構形變,我們可以將操作臂視為一系列剛體通過關節連線形成的一個運動鏈,我們將這些剛體稱為連桿。
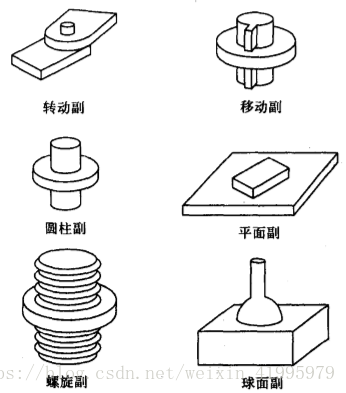
當兩個剛體之間的運動是兩個平面的相對滑動時,面和麵接觸的運動副在接觸部分的壓強較低,被稱為低副,而點或線接觸的運動副稱為高副,高副比低副容易磨損。低副一般有轉動副,移動副,螺旋副,高副有車輪與鋼軌,凸輪與從動件,齒輪傳動等
下圖是常見的低副關節:
常見的操作臂的結構一般優先選擇只有一個自由度的關節作為連桿的連線方式,大部分的操作臂中會包括轉動關節和移動關節。只有很少見的情況,會使用具有n個自由度的關節,這種關節也可以抽象的看做用n個單自由度的關節與n-1個長度的連桿組合而成的。
我們在討論操作臂時,會從固定基座開始為連桿編號,我們習慣性地成固定基座為連桿0,接下來的第一個能動的連桿被稱為連桿1,以此類推,最末端的的連桿就稱為連桿n
為了確定連桿之間的位置關係,由於我們把連桿視為剛體,所以關節軸可以用一條直線來描述,我們可以通過兩個引數連桿距離和連桿轉角來描述連桿之間的關係。
在三維空間中任意兩個關節軸之間的的距離均為一個定值,其數值等於兩軸之間公垂線的長度。
至於另一個引數連桿轉角
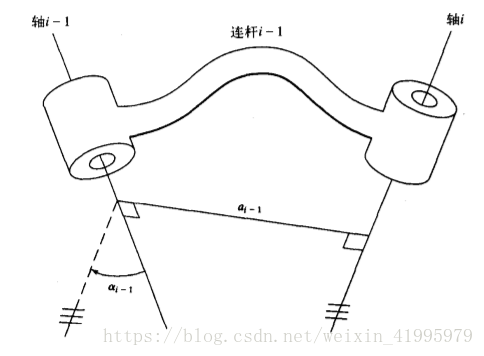
連桿轉角