機器人學筆記之——空間描述和變換:對映
阿新 • • 發佈:2018-11-21
0. 對映
在機器人學的許多問題中,都需要使用不同的參考座標系來表達同一個量,為了描述從一個座標到另一個座標的變換,機器人學引入了對映的概念。
0.0 平移座標系的對映
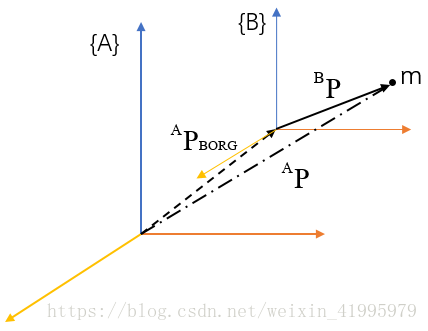
如下圖所示,座標系{A}和{B}的姿態是相同的,在空間中有一個點m,我們希望使用座標系{A}來表示點m,由於兩個座標系是平移關係,所以向量aPborg可以直接表示為{B}相對{A}的位置關係。
在兩個座標系擁有相同姿態這種特殊情況下,我們可以簡單地使用向量的相加求得點m相對座標系{A}的表示——向量aP
將一個向量從一個座標系對映到另一個座標系這整個過程中,矢量表示的點的位置並沒有發生任何改變,只是描述的方式不同了而已。
所以對映的概念就是,“描述”

在這個過程中,我們稱向量
aPborg定義了這個對映,由於兩個座標系的姿態相同,所以向量aPborg已經具備了變換所需要的所有資訊。
0.1 旋轉座標的對映
在上一篇博文中,我們看到了用一組三個向量的矩陣來表示座標系的旋轉變換,該矩陣稱為旋轉矩陣。
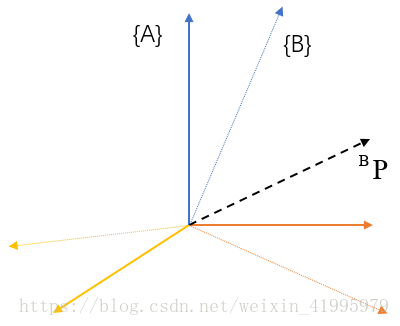
假設現在我們知道一個向量相對於某個座標系的表示,想要得到該向量相對於另一個座標系的表達,而且前後兩個座標系的原點相互重合。也就是說後者是由前者做單純的旋轉變換得到的。
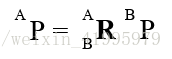
如上圖所示,我們已知bP以及{A}和{B}的變換關係,現在想求出aP
那麼只要用bP與旋轉矩陣相乘就能夠得到aP
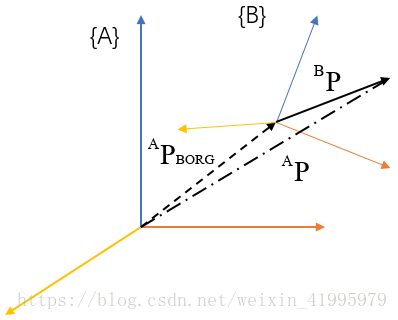
前面說的兩種情況比較特殊,分別只有位置和姿態的變換,那如果上升到座標系層面的變換,即位置和姿態同時變換的時候,對映會是怎麼樣的呢?
現在我們就來考慮對映的一般情況:
整個變換過程一次進行的話比較麻煩,那我們就把他拆開來看,尋找一箇中間座標系,該座標系與{A}的姿態相同,原點與{B}重合。這樣我們就能把變換拆分成先平移後旋轉的方式,無論從直觀上還是從數學上看都會方便很多。
在數學推導的過程中,我們也會使用一種更加簡潔的方式來表達上式