
機器人學筆記之——操作臂運動學:機器人運動學問題舉例
0. 經典:PUMA560
相信你已經不是第一次見過這傢伙:
沒辦法,它實在是太經典了,導致了機器人學的一系列教材都使用PUMA560作為教具來講解。
PUMA560擁有6個自由度,負載2kg,採用了直流伺服來驅動關節,是機器人歷史上最經典的工業機器人之一。
0.0 確立座標系以及連桿引數
為了研究機器人的運動學,我們首先需要考察機器人的結構,並且為其每個連桿建立連桿座標系,根據所建的座標系確定各個連桿引數,也就是常說的D-H引數。
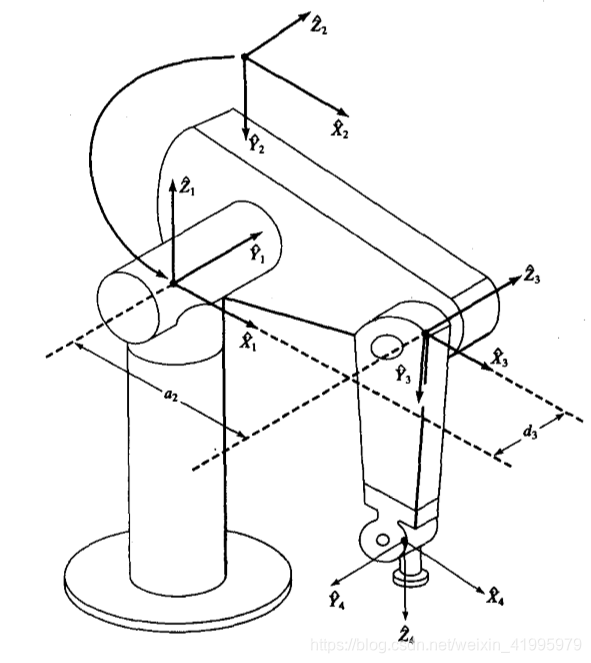
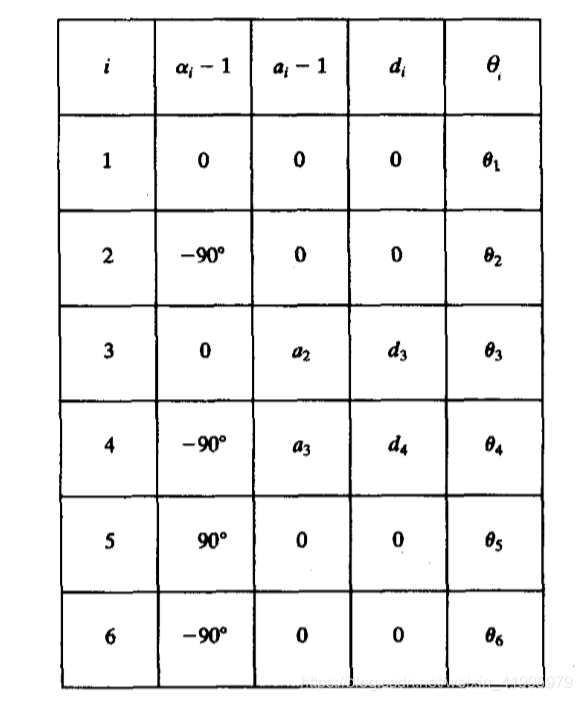
上圖是《機器人學導論》書中的建系方法,你可能會在別的地方見過很多不同的建系方法,因為座標系的確定結果不唯一,那麼D-H引數表也是不唯一的。根據我們之前學過的關於連桿座標系和連桿引數的知識,我們可以寫出下面這個D-H引數表
這裡有一點要注意一下,由於在圖中我們很難清楚地看見6個自由度,那是由於腕部的結構難以在圖上表示出來,其實腕部的結構是像下面這樣的:
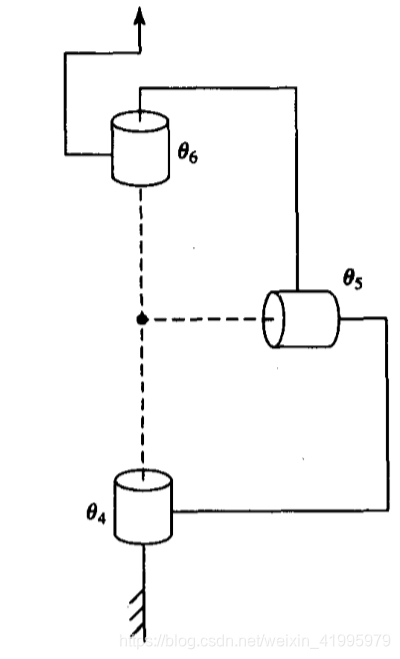
如果你看到這很懵逼,沒關係我一開始看的時候也是這樣,多看幾次就會懂了。。。。
0.1 求出各個變換矩陣
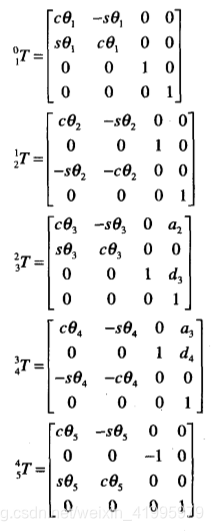
當我們得到了D-H引數表以後,求出各個相鄰連桿之間的變換矩陣就變得很容易了,因為我們在這裡就可以使用之前求出來過的公式了:
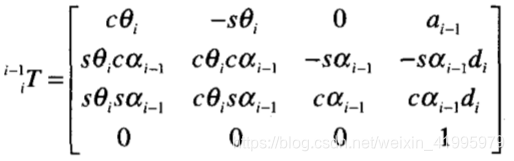
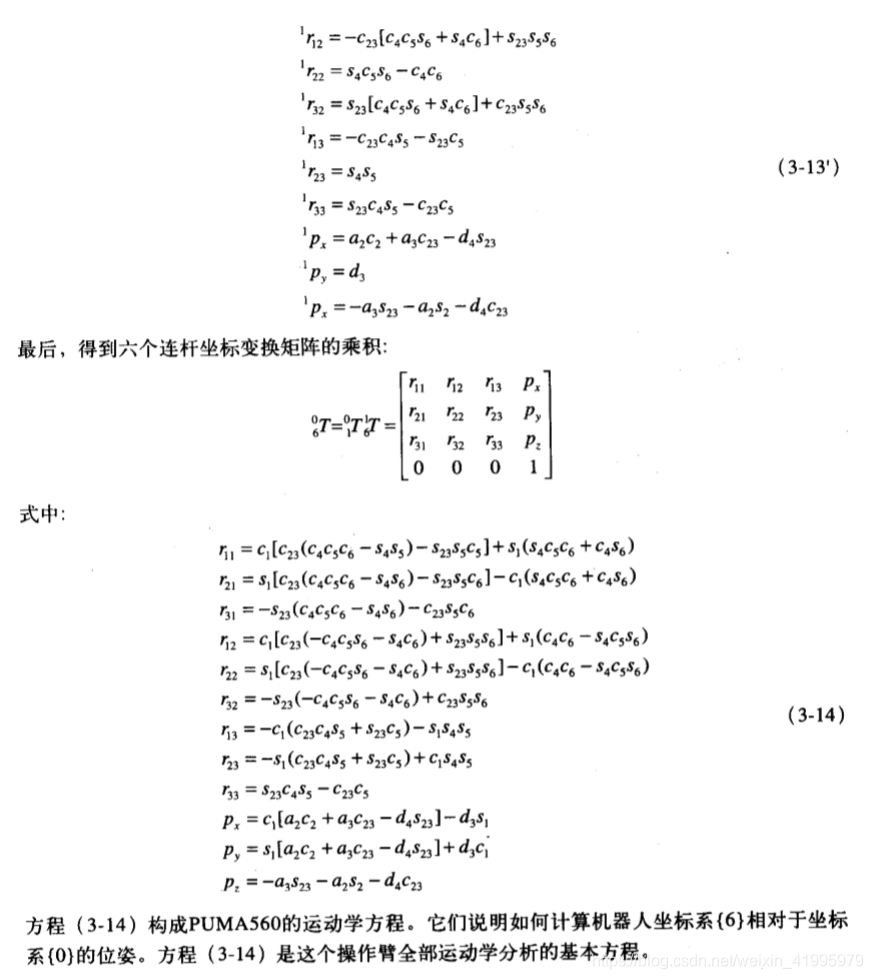
我們求出來的結果是:
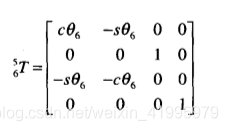
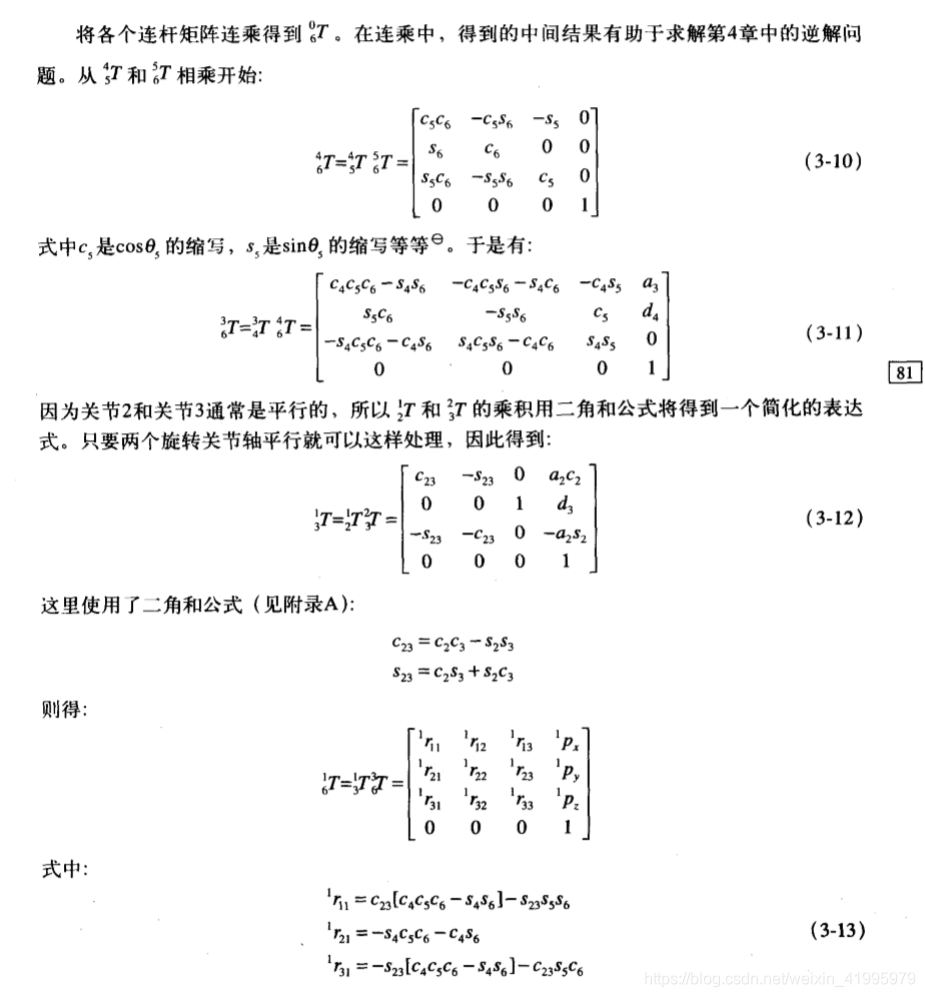
0.2 各個矩陣連乘
相關推薦
機器人學筆記之——操作臂運動學:機器人運動學問題舉例
0. 經典:PUMA560 相信你已經不是第一次見過這傢伙: 沒辦法,它實在是太經典了,導致了機器人學的一系列教材都使用PUMA560作為教具來講解。 PUMA560擁有6個自由度,負載2kg,採用了直流伺服來驅動關節,是機器人歷史上最經典的工業機器人之一。 0.0 確立座標系以及
機器人學筆記之——操作臂運動學:座標系的標準命名以及工具的定位
0. 座標系的標準命名 為了規範起見,我們有必要給機器人和工作空間賦予專門的命名和專門的座標系。 0.0 基座標系 {B} 基座標系{B}位於操作臂的基座上,其實它和座標系{0}指的是同一個東西,只不過名稱不同而已。由於它固連於操作臂的靜止部位,所以也稱連桿0 0.1 工作臺
機器人學筆記之——操作臂運動學:操作臂運動學
0. 操作臂運動學 在這部分中,我們將完成推匯出相鄰連桿之間座標系變換的一般形式,然後將各個相鄰連桿之間的變換聯絡起來,由此得出連桿n相對於連桿0的位置和姿態 0.0 連桿變換的推導 所謂連桿變換,就是我們要求出座標系{i}相對於座標系{i-1}的變換。這樣我們就可以將座標系{i
機器人學筆記之——操作臂運動學:對連桿座標系的規定
0. 對連桿座標系的規定 為了描述每個連桿與相鄰連桿之間的相對位置關係,我們通常會在每個連桿上定義一個相對連桿固定的座標系,稱為固連座標系,根據固連座標系所在的連桿為其命名。因此固連在連桿i上的固連座標系稱為座標系{i} 0.0 連桿鏈中的中間連桿 0.1 連桿鏈中的首尾
機器人學筆記之——操作臂運動學:關於連桿連線的描述
0. 關於連桿連線的描述 0.0 連桿鏈中的中介軟體 相鄰兩個連桿之間會有一個公共的關節軸,沿著公共關節軸的方向的一個偏移距離可以用一個引數來描述,稱之為連桿偏移。在關節軸i上的連桿偏移記為 用另一個引數描述兩相鄰連桿繞公共關節軸的夾角,稱之為關節角,這是一個在運動過程中的變數,
機器人學筆記之——操作臂運動學:連桿描述
操作臂運動學概述 操作臂運動學研究操作臂的運動特性,而不考慮使操作臂產生運動時施加的力。本部分主要討論的是操作臂的正運動學,只研究靜止狀態下操作臂連桿的位置和姿態問題,暫時不考慮速度和加速度。 為了處理操作臂複雜的幾何引數,我們會在操作臂的每一個連桿上附加上一個連桿座標系,以便於我們來討
機器人學筆記之——空間描述和變換:姿態的其他描述方法
0.姿態的其他描述方法 如果你也有看機器人學導論的原書的話,可能會看到這樣一個東西:正交矩陣的凱萊公式。不知道你是怎麼樣的,反正我是一臉懵逼,有這麼個東西嗎?百度好像也找不到呀,最後還是靠谷歌和原書的參考文獻才找到這麼個東西的。 正交矩陣的凱萊公式 0.0 X-Y-Z固定角座標系
機器人學筆記之——空間描述和變換:變換方程
0. 變換方程 假設,在上圖表示的眾多關係中,只有 是未知的,所以現在我們想要將其求出來。 通過觀察發現,由{U}變換到{D}的過程其實有兩種表示方式: 第一種: 第二種: 將上面兩個式子聯立起來,我們可以得到一個新的方程: 我們可以發現,在這條新的方程中,僅有一個未知量,那麼
機器人學筆記之——空間描述和變換:變換演算法
0. 變換演算法 0.0 混合變換 在上圖的中,假設每個座標系相對於前一個座標系都是已知的,現在已知cP要求aP 既然每個座標系相對前一個座標系都是已知的,那麼就意味著我們可以根據cP倒著一步步變換成aP 首先是變換成bP: 然後再由bP變換成aP: 當然,分開寫比較不
機器人學筆記之——空間描述和變換:運算元
0. 運算元:平移、旋轉和變換 用於座標系間點的對映的通用數學表示式稱為運算元,包括點的平移運算元、旋轉運算元和平移加旋轉運算元。 0.0 平移運算元 平移將空間中的一個點沿著一個已知的向量方向移動一定距離。對空間中一點實際平移的描述僅與一個座標系有關。空間
機器人學筆記之——空間描述和變換:對映
0. 對映 在機器人學的許多問題中,都需要使用不同的參考座標系來表達同一個量,為了描述從一個座標到另一個座標的變換,機器人學引入了對映的概念。 0.0 平移座標系的對映 如下圖所示,座標系{A}和{B}的姿態是相同的,在空間中有一個點m,我們希望使用座標系{A}來表示點m,由於兩
機器人學筆記之——空間描述和變換:位置、姿態與座標系
0.空間描述:位置、姿態與座標系 0.0 位置描述: 位置描述這個沒什麼好說的,就是用矩陣的方式表示空間座標系中的向量,如上圖,在座標系{A}中有向量 aP ,其矩陣表示如下圖,其數值就是向量在當前座標系下的模長。 0.1 姿態描述: 我們可以很直觀地明白一個道理,在空間
Framework7學習筆記之 操作表(動作組)
nbsp 顯示 span gpo dial 頁面 red text body 一:操作表 操作表其實是一組按鈕,從屏幕底部彈出,點擊不同按鈕執行不同響應函數。 二:舊版:在js文件中定義並顯示操作表 $$(‘選擇器‘).on(‘click‘, functi
Introduction to 3D Game Programming with DirectX 12 學習筆記之 --- 第七章:在Direct3D中繪製(二)
程式碼工程地址: https://github.com/jiabaodan/Direct12BookReadingNotes 學習目標 理解本章中針對命令佇列的更新(不再需要每幀都flush命令佇列),提高效能; 理解其他兩種型別的根訊號引數型別:根描述
Introduction to 3D Game Programming with DirectX 12 學習筆記之 --- 第六章:在Direct3D中繪製
程式碼工程地址: https://github.com/jiabaodan/Direct12BookReadingNotes 學習目標 熟悉Direct3D介面的定義,儲存和繪製幾何資料 ; 學習編寫基本的頂點和畫素著色器; 學習使用渲染流水線狀態
Introduction to 3D Game Programming with DirectX 12 學習筆記之 --- 第五章:渲染流水線
學習目標 瞭解幾個用以表達真實場景的標誌和2D影象的深度空間; 學習在Direct3D中如何表示3D物體; 學習如何模擬虛擬攝像機; 理解渲染流水線:如何用幾何描述的3D場景渲染出2D影象; 1 3D幻覺 如何在2D平面(顯示器)上產生
Introduction to 3D Game Programming with DirectX 12 學習筆記之 --- 第四章:Direct 3D初始化
學習目標 對Direct 3D程式設計在3D硬體中扮演的角色有基本瞭解; 理解COM在Direct 3D中扮演的角色; 學習基本的圖形學概念,比如儲存2D影象、頁面切換,深度緩衝、多重紋理對映和CPU與GPU如何互動; 學習如何使用效能計數函式讀取高精度時間;
Introduction to 3D Game Programming with DirectX 12 學習筆記之 --- 第三章:變換
學習目標 理解如何用矩陣表示線性變換和仿射變換; 學習在座標系中縮放,旋轉和移動幾何體; 學習利用矩陣的乘法合併幾個變換矩陣; 學習如何在座標系之間轉換,並且表示為轉換矩陣;斜體樣式 學習如何利用DirectX Math庫提供的方法構造轉換矩陣。
Stereo Matching文獻筆記之(八):《On Building an Accurate Stereo Matching System on Graphics Hardware》讀後感
版權宣告:作者:迷霧forest(請隨意轉載,若顧及到博主打字耗費的卡路里,請新增博主小名,權當娛樂) https://blog.csdn.net/wsj998689aa/article/details/49403353 週末嘍~!又有時間寫寫部落格了,繼續之前的
Stereo Matching文獻筆記之(一):《On Building an Accurate Stereo Matching System on Graphics Hardware》讀後感
(轉載:http://blog.csdn.net/wsj998689aa/article/details/49403353, 作者:迷霧forest) 目錄(?)[-] 演算法詳解 適合並行 特徵融合 自適應區域