
機器人學筆記之——空間描述和變換:變換方程
0. 變換方程
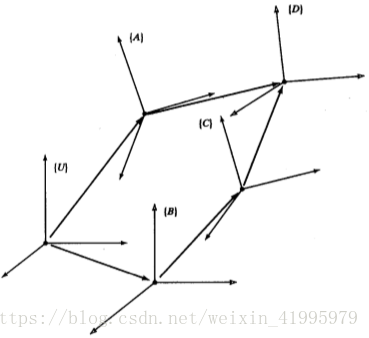
假設,在上圖表示的眾多關係中,只有
是未知的,所以現在我們想要將其求出來。
通過觀察發現,由{U}變換到{D}的過程其實有兩種表示方式:
第一種:
第二種:
將上面兩個式子聯立起來,我們可以得到一個新的方程:
我們可以發現,在這條新的方程中,僅有一個未知量,那麼我們就可以輕鬆地將其求出:




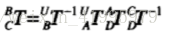
現在我們來看一下一個小小的應用場景:
如上圖所示,假設變換
已知,並且描述了{T},它是相對於{B}的。又已知工作臺相對於機械臂基座的空間位置,並且螺栓相對於工作臺座標系的位置也是已知的,也就是說
和
都是已知的,現在我們要來求出:
根據我們剛剛說的內容,找出兩個方程,聯立形成新的方程,就可以得到:





相關推薦
機器人學筆記之——空間描述和變換:姿態的其他描述方法
0.姿態的其他描述方法 如果你也有看機器人學導論的原書的話,可能會看到這樣一個東西:正交矩陣的凱萊公式。不知道你是怎麼樣的,反正我是一臉懵逼,有這麼個東西嗎?百度好像也找不到呀,最後還是靠谷歌和原書的參考文獻才找到這麼個東西的。 正交矩陣的凱萊公式 0.0 X-Y-Z固定角座標系
機器人學筆記之——空間描述和變換:變換方程
0. 變換方程 假設,在上圖表示的眾多關係中,只有 是未知的,所以現在我們想要將其求出來。 通過觀察發現,由{U}變換到{D}的過程其實有兩種表示方式: 第一種: 第二種: 將上面兩個式子聯立起來,我們可以得到一個新的方程: 我們可以發現,在這條新的方程中,僅有一個未知量,那麼
機器人學筆記之——空間描述和變換:變換演算法
0. 變換演算法 0.0 混合變換 在上圖的中,假設每個座標系相對於前一個座標系都是已知的,現在已知cP要求aP 既然每個座標系相對前一個座標系都是已知的,那麼就意味著我們可以根據cP倒著一步步變換成aP 首先是變換成bP: 然後再由bP變換成aP: 當然,分開寫比較不
機器人學筆記之——空間描述和變換:運算元
0. 運算元:平移、旋轉和變換 用於座標系間點的對映的通用數學表示式稱為運算元,包括點的平移運算元、旋轉運算元和平移加旋轉運算元。 0.0 平移運算元 平移將空間中的一個點沿著一個已知的向量方向移動一定距離。對空間中一點實際平移的描述僅與一個座標系有關。空間
機器人學筆記之——空間描述和變換:對映
0. 對映 在機器人學的許多問題中,都需要使用不同的參考座標系來表達同一個量,為了描述從一個座標到另一個座標的變換,機器人學引入了對映的概念。 0.0 平移座標系的對映 如下圖所示,座標系{A}和{B}的姿態是相同的,在空間中有一個點m,我們希望使用座標系{A}來表示點m,由於兩
機器人學筆記之——空間描述和變換:位置、姿態與座標系
0.空間描述:位置、姿態與座標系 0.0 位置描述: 位置描述這個沒什麼好說的,就是用矩陣的方式表示空間座標系中的向量,如上圖,在座標系{A}中有向量 aP ,其矩陣表示如下圖,其數值就是向量在當前座標系下的模長。 0.1 姿態描述: 我們可以很直觀地明白一個道理,在空間
機器人學導論(一)——空間描述和變換
https://blog.csdn.net/u013745804/article/details/79274900 本著看書一定要寫出來才能理解的心態,我開設了這個專欄,目的有兩個:一是督促自己看書學習;二是與大家一起分享自己的讀書感悟,在大家的批評中成長。 &nbs
機器人學筆記之——操作臂運動學:關於連桿連線的描述
0. 關於連桿連線的描述 0.0 連桿鏈中的中介軟體 相鄰兩個連桿之間會有一個公共的關節軸,沿著公共關節軸的方向的一個偏移距離可以用一個引數來描述,稱之為連桿偏移。在關節軸i上的連桿偏移記為 用另一個引數描述兩相鄰連桿繞公共關節軸的夾角,稱之為關節角,這是一個在運動過程中的變數,
機器人學筆記之——操作臂運動學:連桿描述
操作臂運動學概述 操作臂運動學研究操作臂的運動特性,而不考慮使操作臂產生運動時施加的力。本部分主要討論的是操作臂的正運動學,只研究靜止狀態下操作臂連桿的位置和姿態問題,暫時不考慮速度和加速度。 為了處理操作臂複雜的幾何引數,我們會在操作臂的每一個連桿上附加上一個連桿座標系,以便於我們來討
IP地址和子網劃分學習筆記之《知識學習篇:子網劃分詳解》
子網掩碼 IP地址 子網劃分 在學習掌握了前面的IP地址和子網劃分之《進制計數》和IP地址和子網劃分之《IP地址詳解》這兩部分知識後,接下來將學習子網劃分。 一、子網掩碼 要學習子網劃分,首先就要必須知道子網掩碼,只有掌握了子網掩碼這部分內容,才能很好的理解和劃分子網。 1、子網掩碼介紹 子網掩碼
機器人學筆記之——操作臂運動學:座標系的標準命名以及工具的定位
0. 座標系的標準命名 為了規範起見,我們有必要給機器人和工作空間賦予專門的命名和專門的座標系。 0.0 基座標系 {B} 基座標系{B}位於操作臂的基座上,其實它和座標系{0}指的是同一個東西,只不過名稱不同而已。由於它固連於操作臂的靜止部位,所以也稱連桿0 0.1 工作臺
機器人學筆記之——操作臂運動學:機器人運動學問題舉例
0. 經典:PUMA560 相信你已經不是第一次見過這傢伙: 沒辦法,它實在是太經典了,導致了機器人學的一系列教材都使用PUMA560作為教具來講解。 PUMA560擁有6個自由度,負載2kg,採用了直流伺服來驅動關節,是機器人歷史上最經典的工業機器人之一。 0.0 確立座標系以及
機器人學筆記之——操作臂運動學:操作臂運動學
0. 操作臂運動學 在這部分中,我們將完成推匯出相鄰連桿之間座標系變換的一般形式,然後將各個相鄰連桿之間的變換聯絡起來,由此得出連桿n相對於連桿0的位置和姿態 0.0 連桿變換的推導 所謂連桿變換,就是我們要求出座標系{i}相對於座標系{i-1}的變換。這樣我們就可以將座標系{i
機器人學筆記之——操作臂運動學:對連桿座標系的規定
0. 對連桿座標系的規定 為了描述每個連桿與相鄰連桿之間的相對位置關係,我們通常會在每個連桿上定義一個相對連桿固定的座標系,稱為固連座標系,根據固連座標系所在的連桿為其命名。因此固連在連桿i上的固連座標系稱為座標系{i} 0.0 連桿鏈中的中間連桿 0.1 連桿鏈中的首尾
Introduction to 3D Game Programming with DirectX 12 學習筆記之 --- 第十六章:實例化和截頭錐體裁切
srv 參數 linear clam 階段 res lease log multiple 原文:Introduction to 3D Game Programming with DirectX 12 學習筆記之 --- 第十六章:實例化和截頭錐體裁切
Python學習筆記之文件和流
關閉 write finall 存儲路徑 大文件 描述 可選參數 針對 硬盤 打開文件:open(name[,mode[,buffering]]),返回一個文件對象,模式(mode)和緩沖(buffering)是兩個可選參數。 假設有一個名為somefile.txt的文件,
ELK 學習筆記之 elasticsearch Shard和Segment概念
tran article str 寫到 ext 壓力 執行 details 學習筆記 Shard和segment概念: 轉載: http://blog.csdn.net/likui1314159/article/details/53217750 Shard(分片)
Zeppelin 學習筆記之 Zeppelin安裝和elasticsearch整合
XML exp ado 8.0 elk mage search tor 選擇 Zeppelin安裝: Apache Zeppelin提供了web版的類似ipython的notebook,用於做數據分析和可視化。背後可以接入不同的數據處理引擎,包括spark, hive,
Python 學習筆記 之 day4 sict和set
變慢 現象 重復 不存在 取出 .get 操作 新的 運行 dict -- dictionary 一組key的集合,包含key與value的對應。 Python內置的字典,在其他語言中成為map,使用key-value存儲,具有幾塊的查找速度。 和li
spark筆記之模式匹配和樣例類
數組 object c spa 協調 一個 數據 好的 處理 zookeepe 階有一個十分強大的模式匹配機制,可以應用到很多場合:如開關語句,類型檢查等並且階還提供了樣例類,對模式匹配進行了優化,可以快速進行匹配。1.1。匹配字符串 package cn.itcast.c